Games101_19_20 Cameras Lenses and Light Fileds
Lecture19
讲相机的,老本行笔记直接看别人的吧;
b). Light Field / Lumingraph(光场)
 |
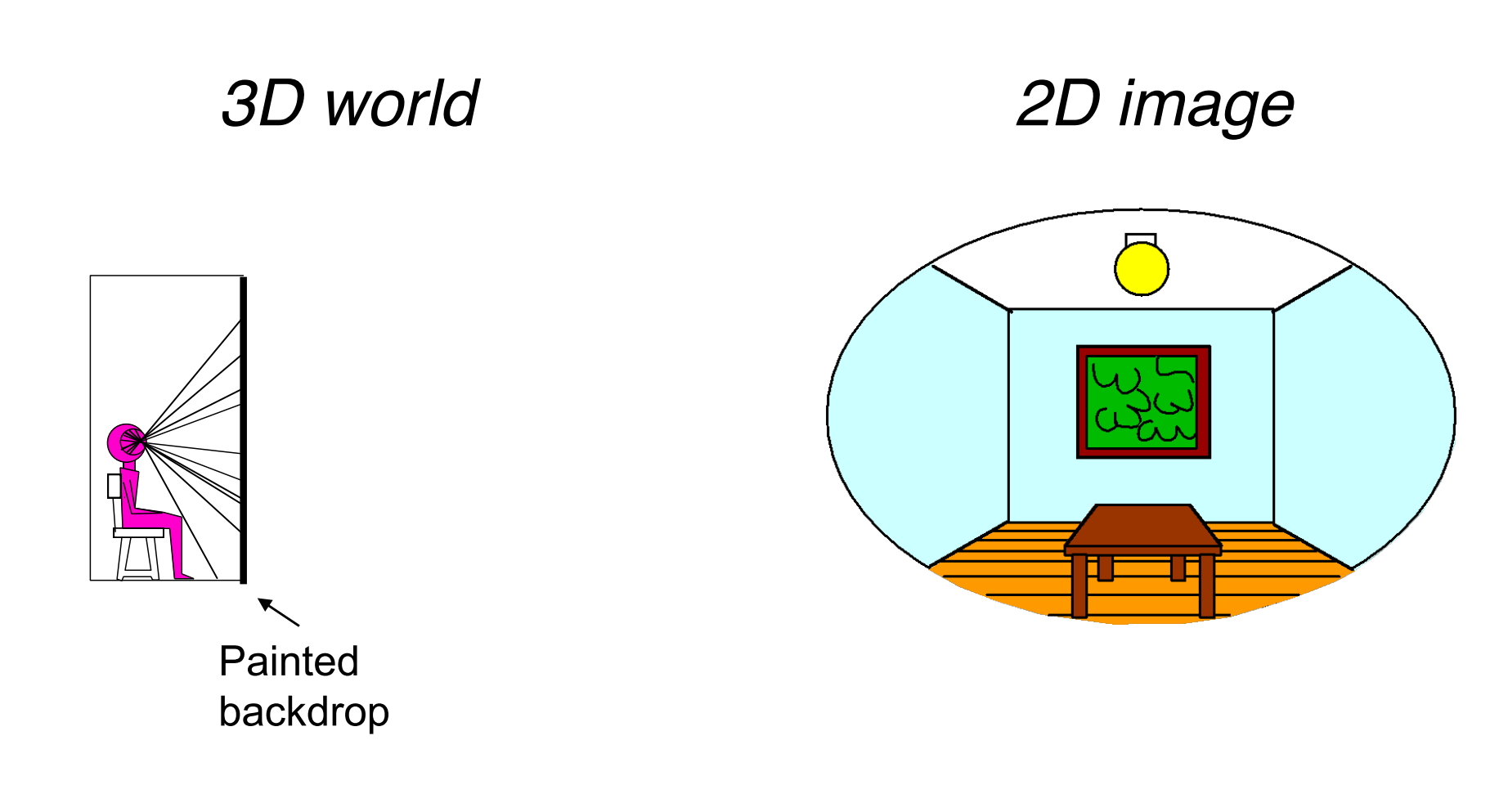 |
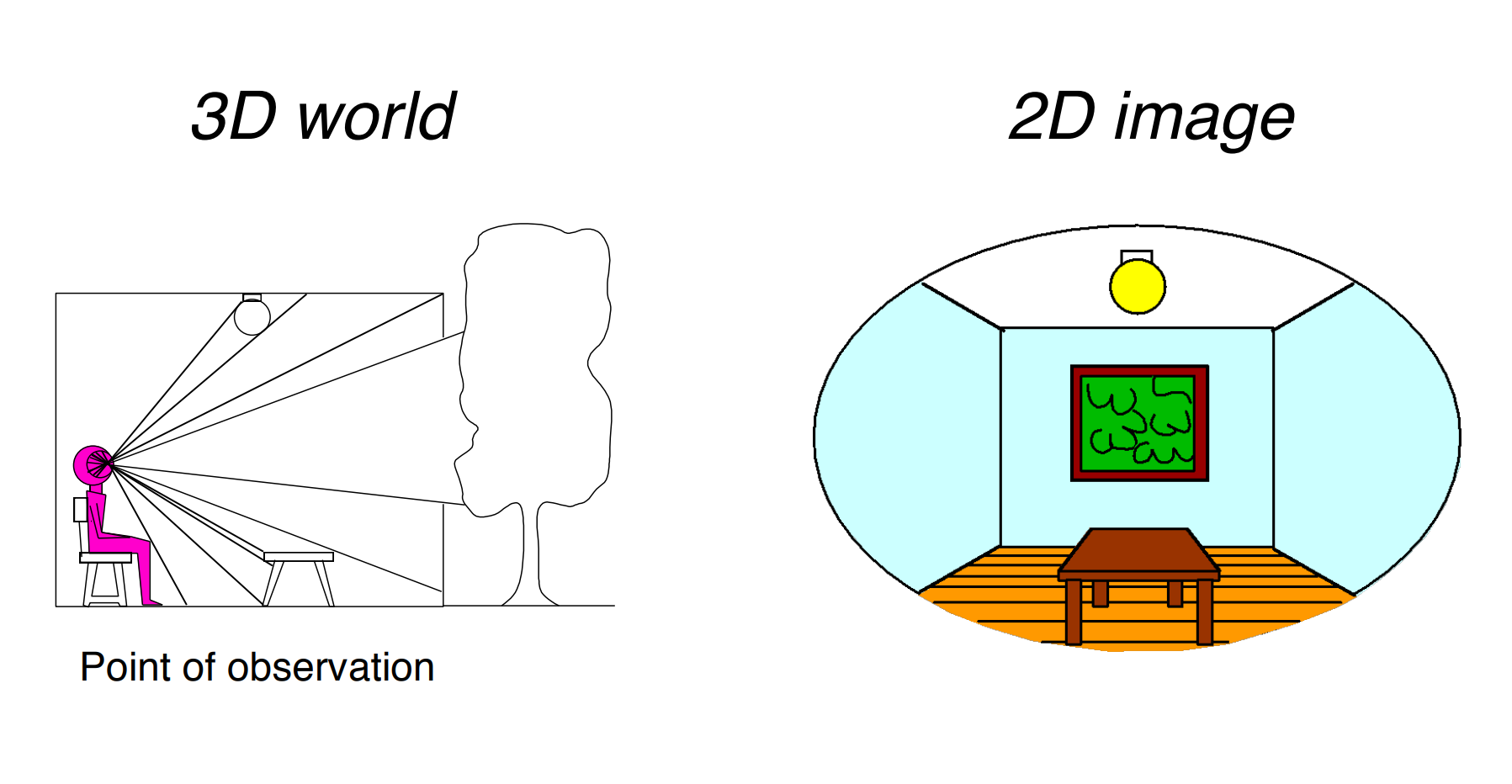
- 两者看到的光线信息完全相同,那人眼中的世界就完全相同;
b.1). The Plenoptic Function(全光函数)
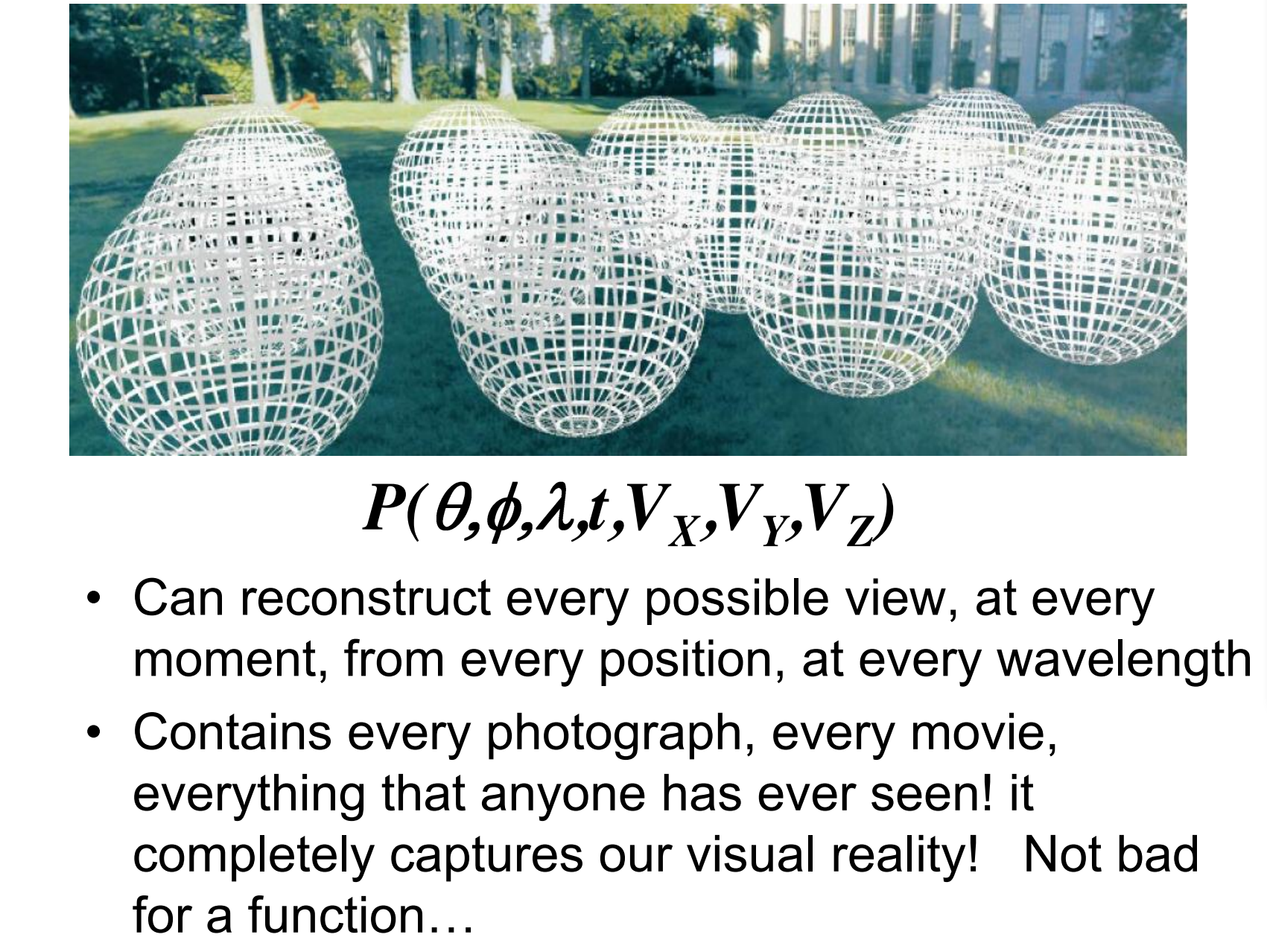
- 现实世界可以用一个七维的全光函数进行描述,记录了任意时间,不同位置的不同方向接收光的波长
- 参数:
- $\theta$ :方位角
- $\phi$:俯仰角
- $\lambda$:波长
- $t$:时间
- $V_X,V_Y,V_Z$:位置
b.2). Light Field
光场则可以认为是记录了任何一个点所接收的任何一个方向的irradiance。
- 可用四维函数表示,二维描述位置,二维描述方向
- 光线可由两个点定义,因此这四维可改写成s,t,u,v。即两个平面上的位置;
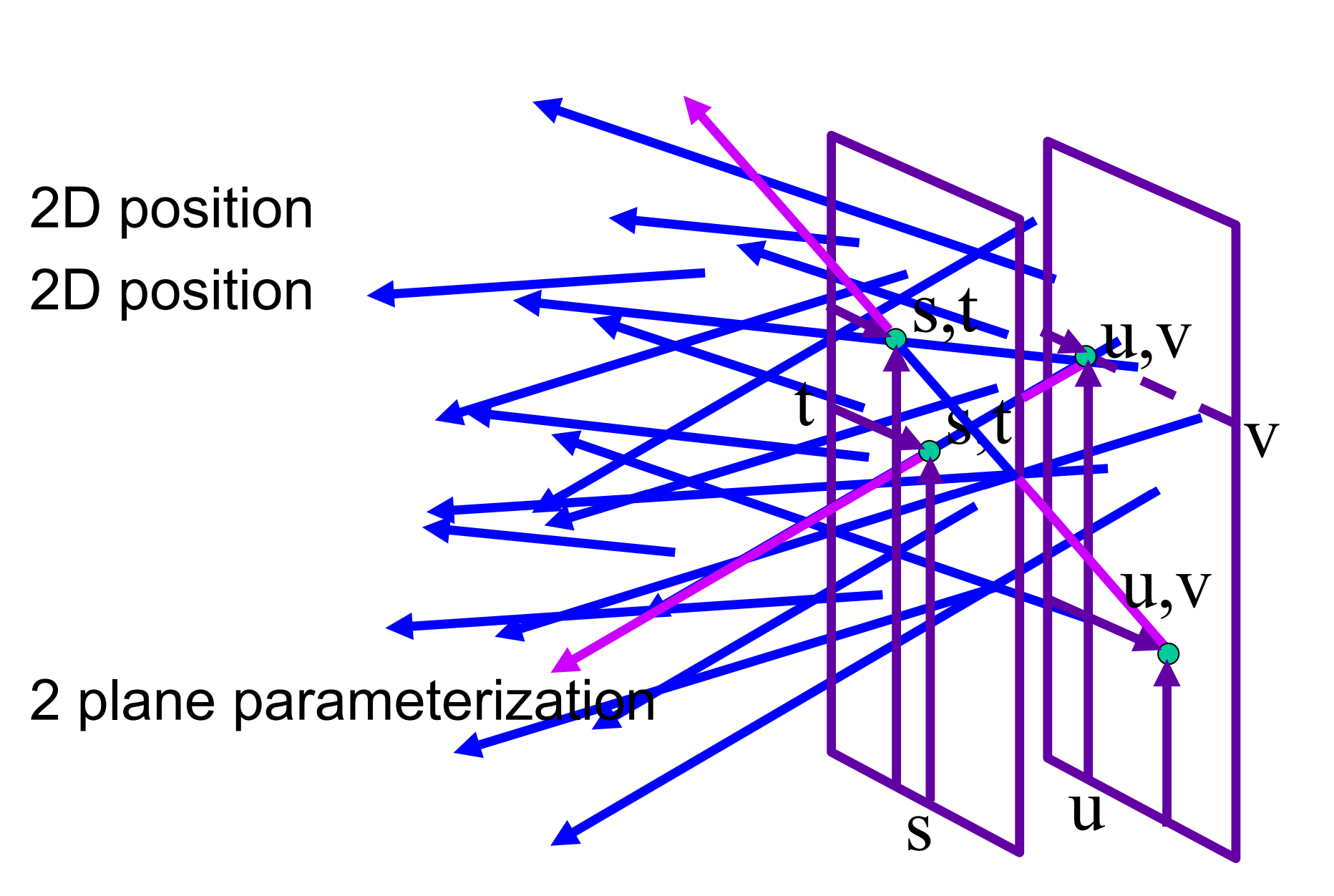
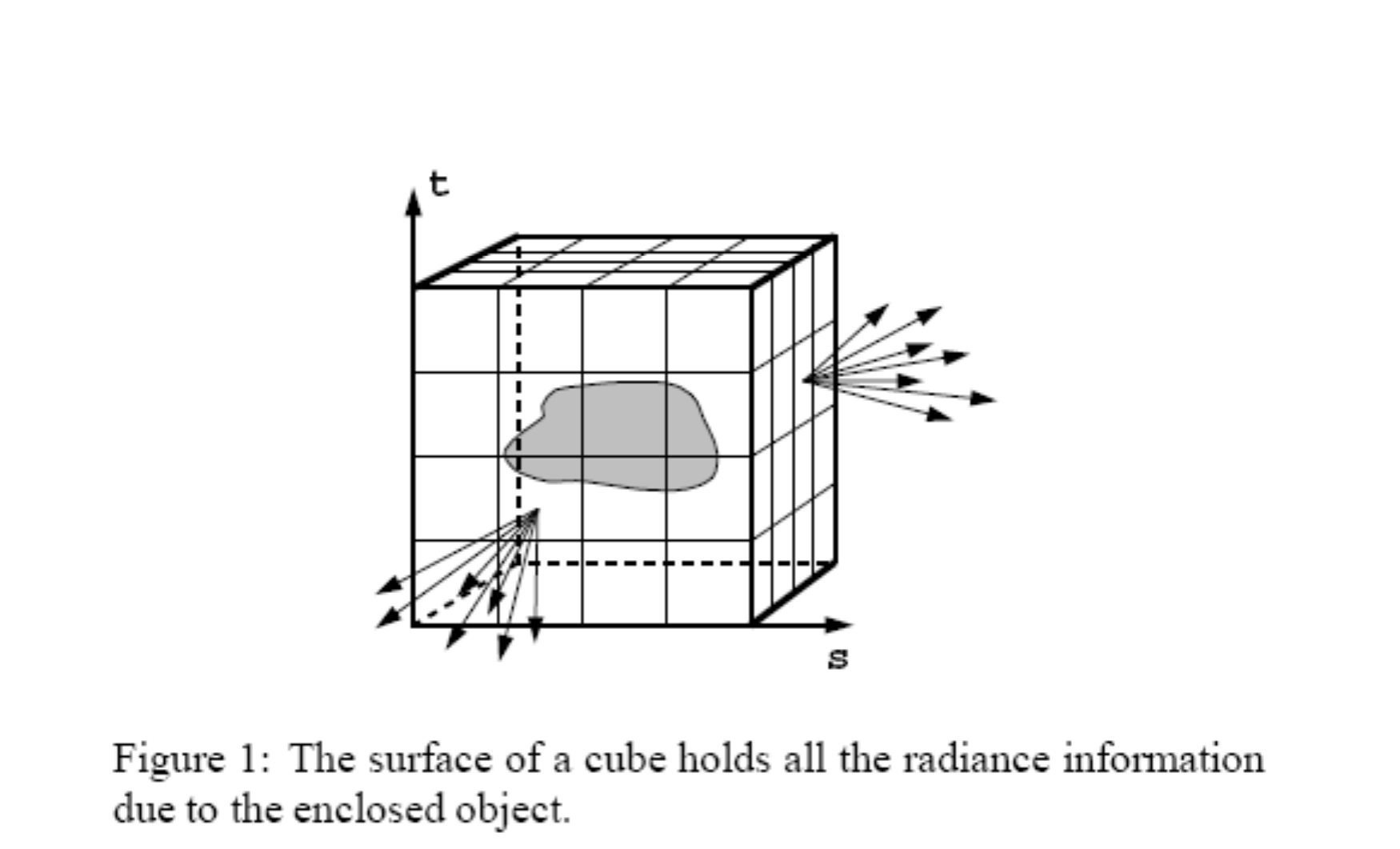
由此得出,描述一个物体的光场,只需要记录其包围盒上四维的全光函数即可
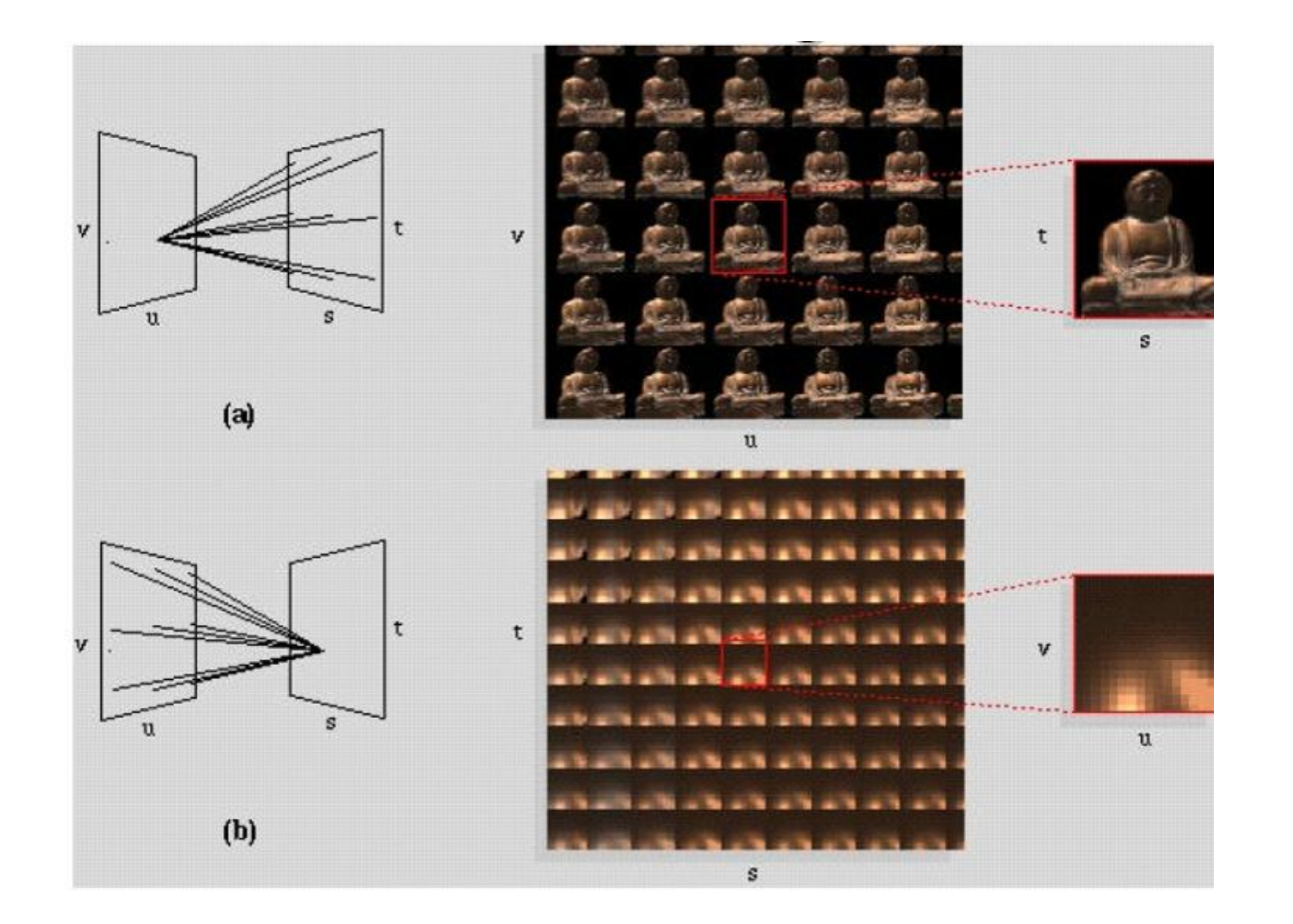
从uv平面看向st平面,得到的是这个物体从各个方向看的相应的图像;
而从st看向uv,则得到的是这个物体在这个方向的irradiance的集合(不是合起来,而是类似二维数组的集合)即radiance
st到uv
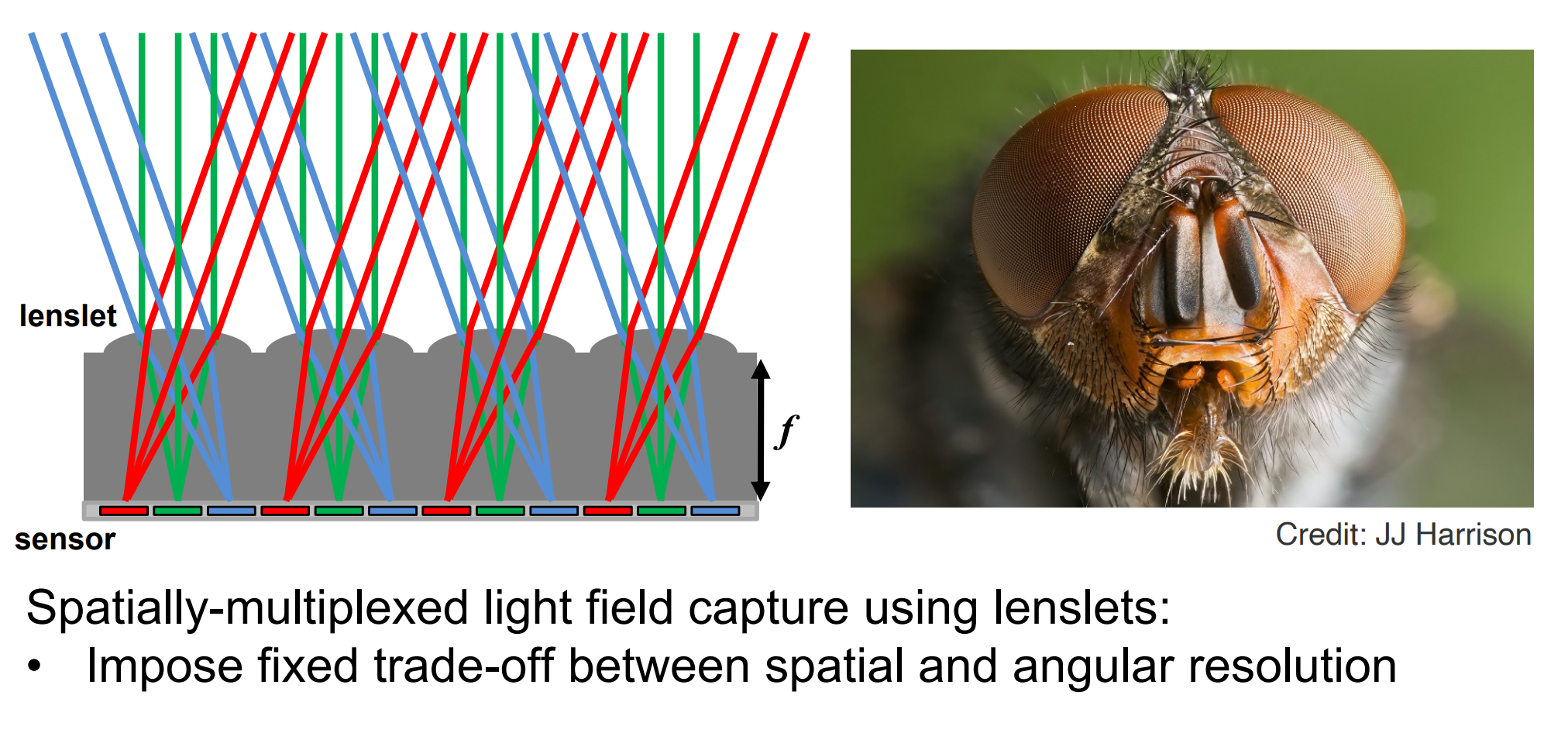
- 记录不同方向的光线radiance(注意和拜耳阵列的区分,这里三色只是代表不同方向)
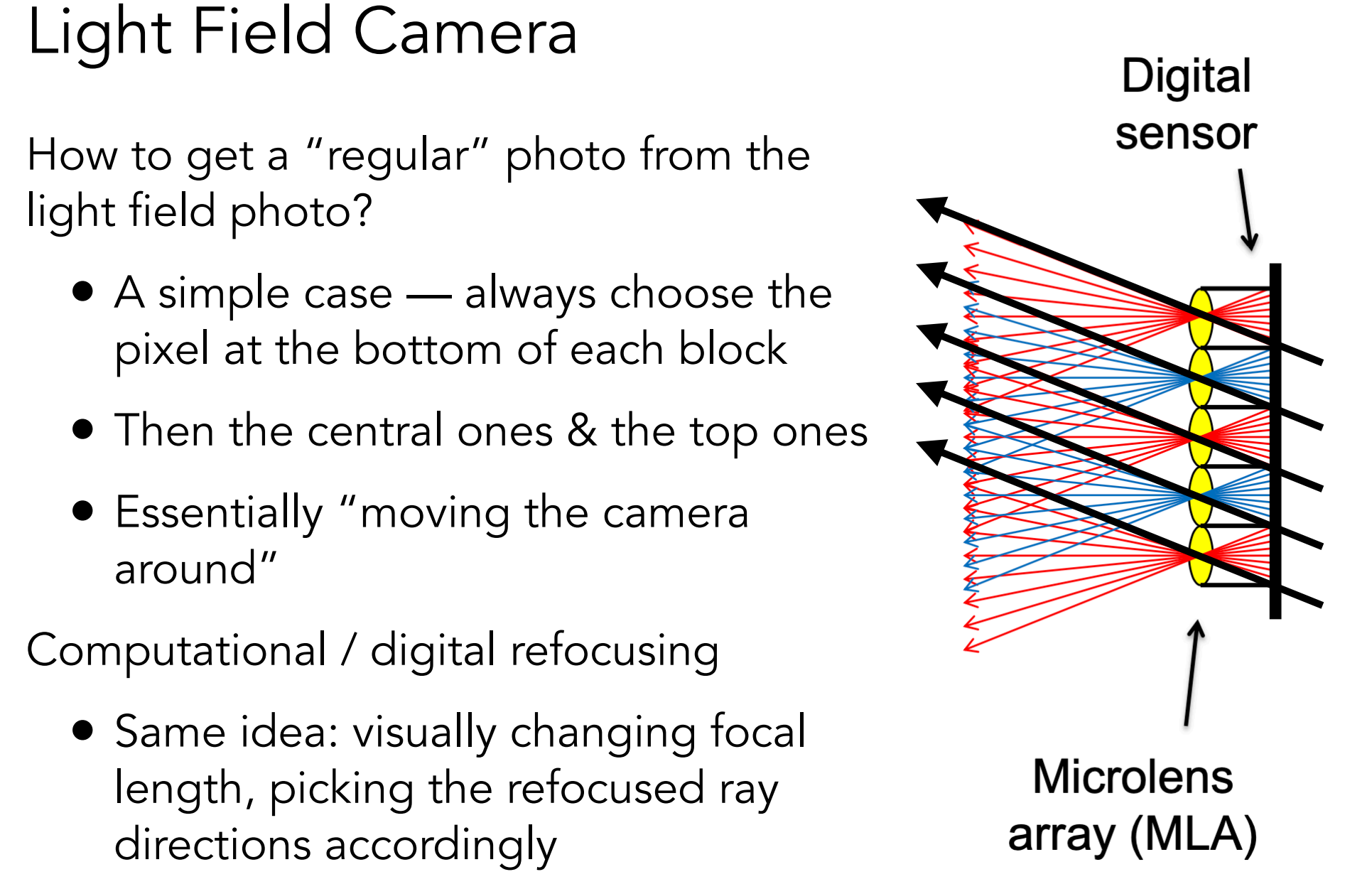
b.3). Light Field Camera
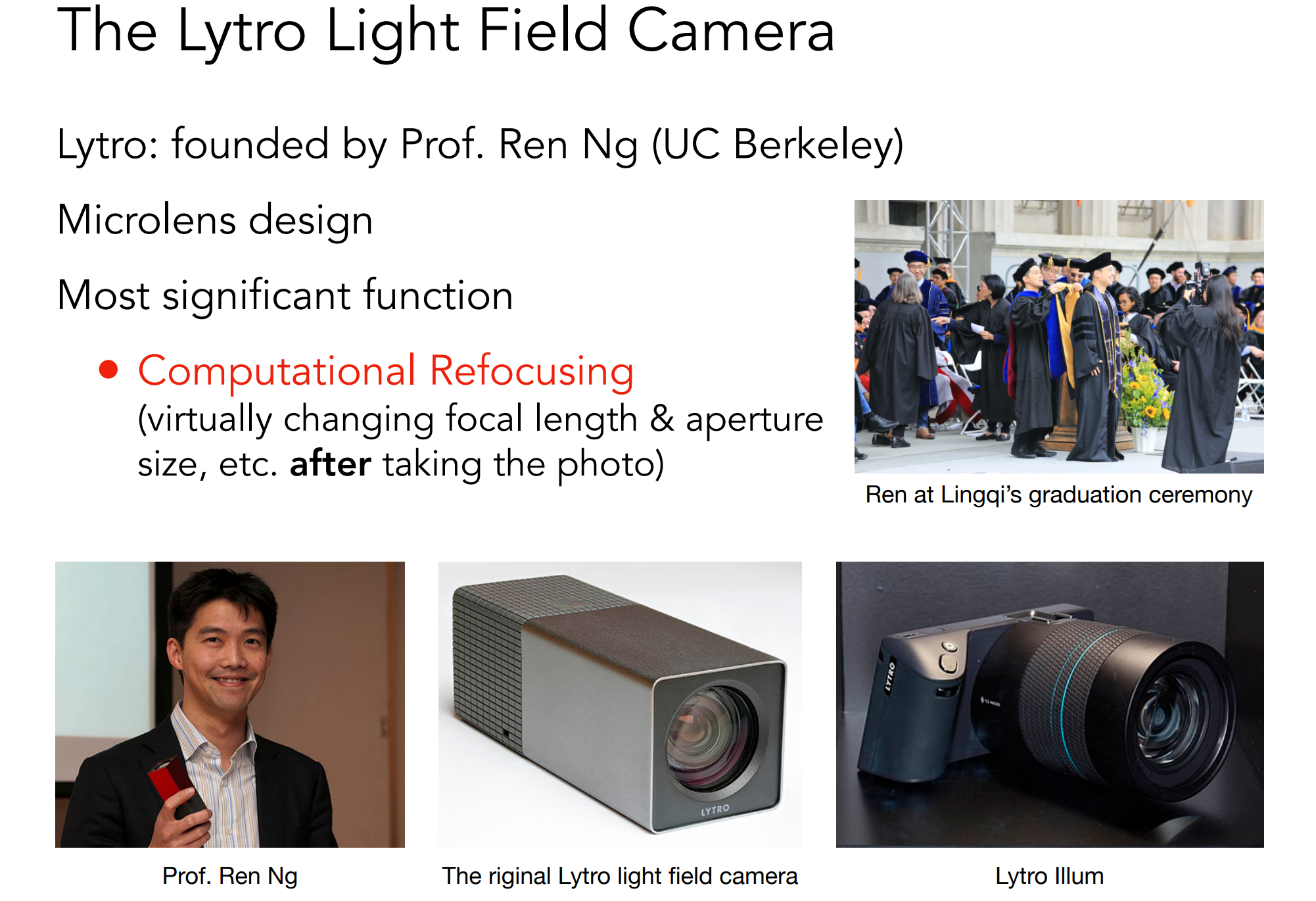
支持先拍照,后期动态调焦、光圈等