Games101_21_22 Animation
Lecture 21 Animation
a). History
b). Keyframe
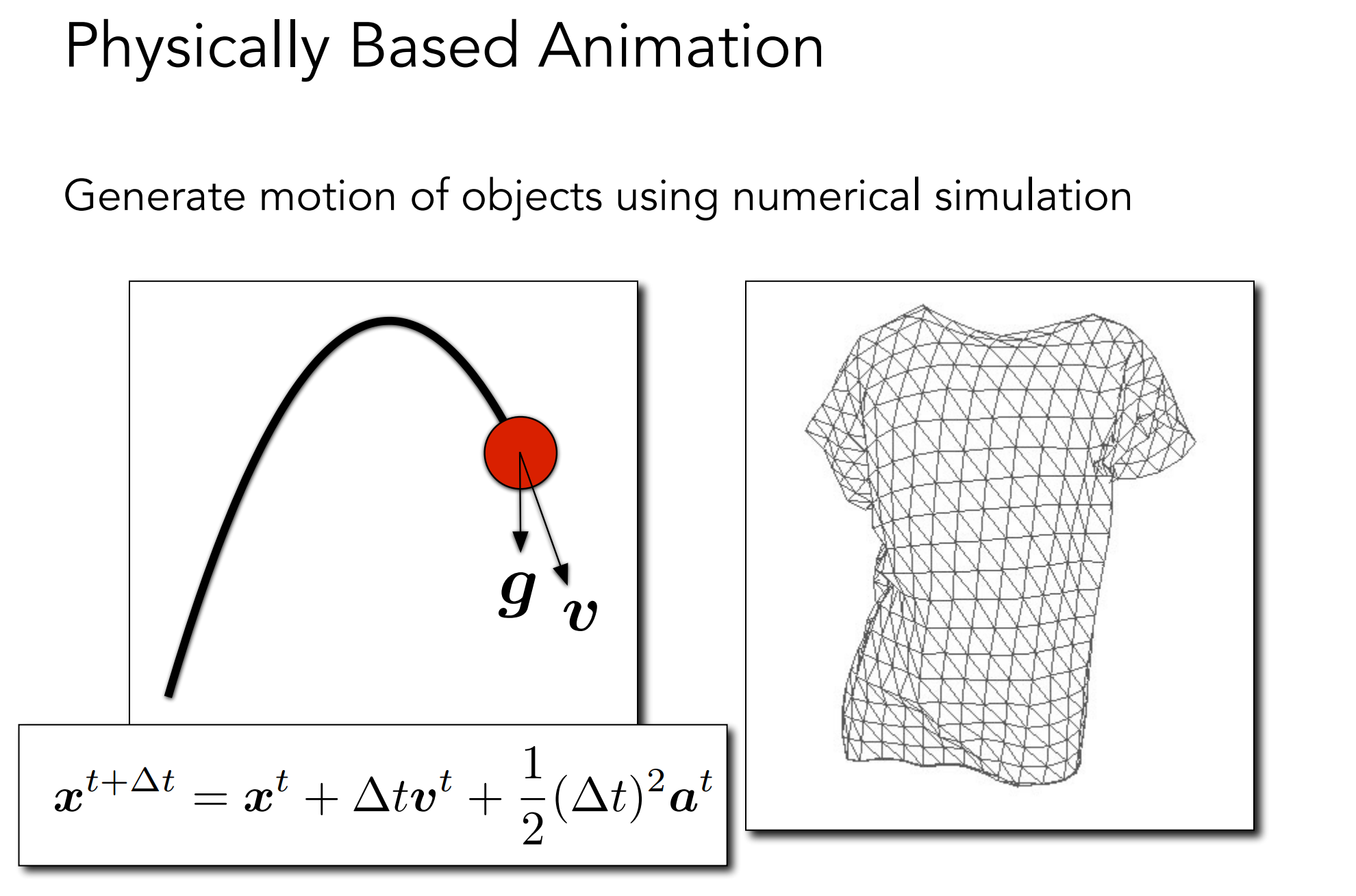
c). Physical Simualtion
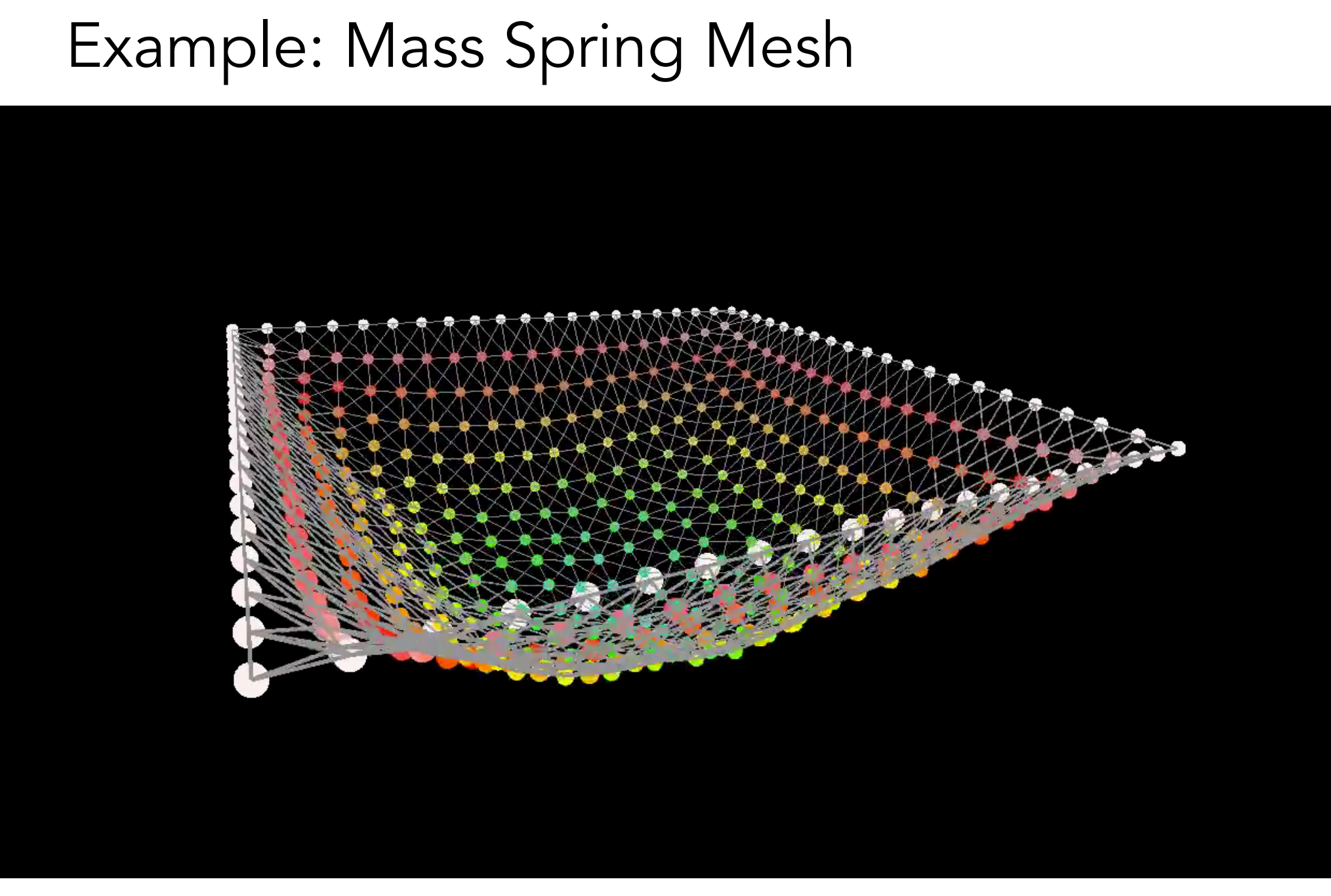
c.1). Mass Spring System
Idealized spring
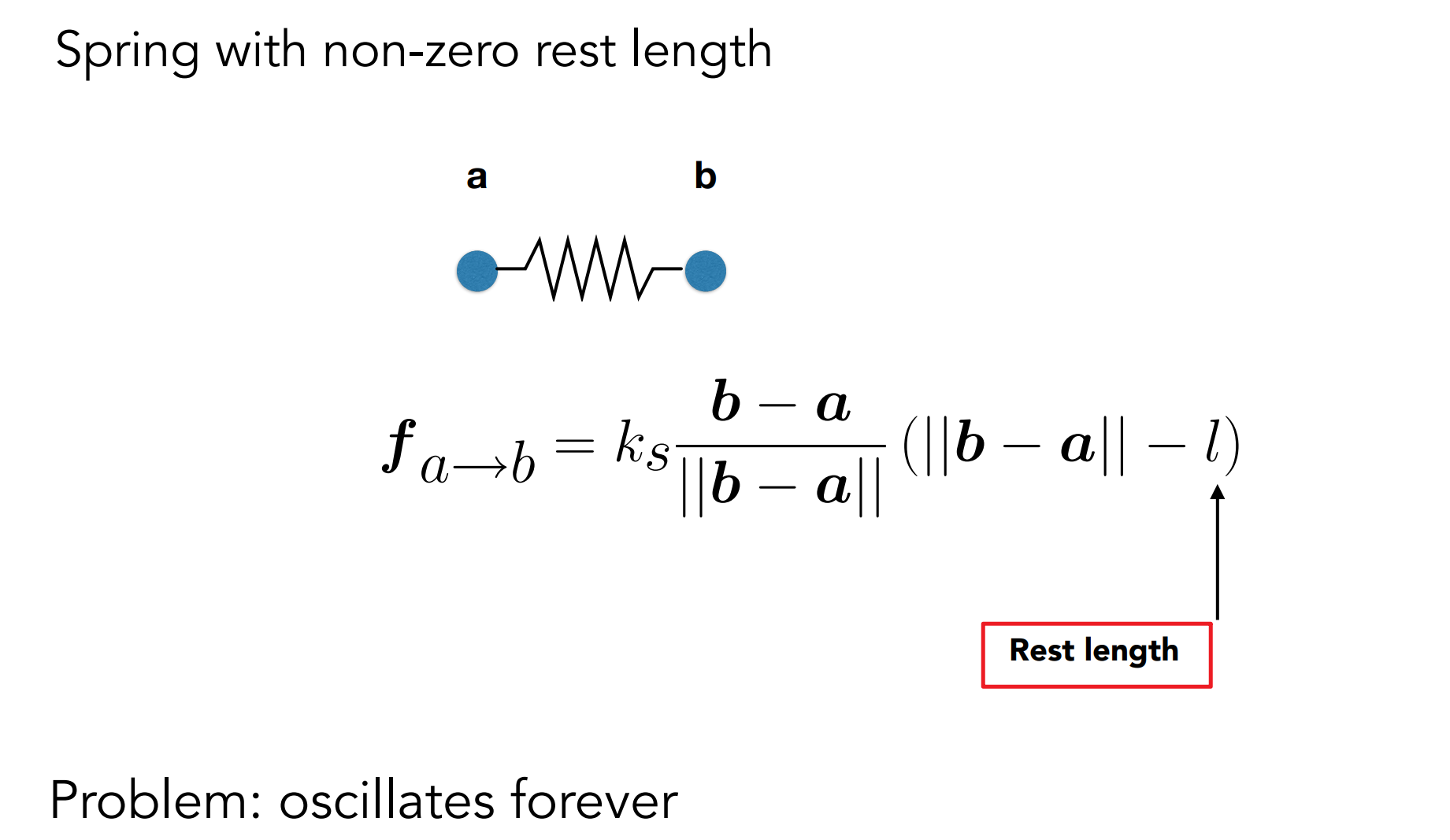
- 但永远不会停止,因此加入摩擦力
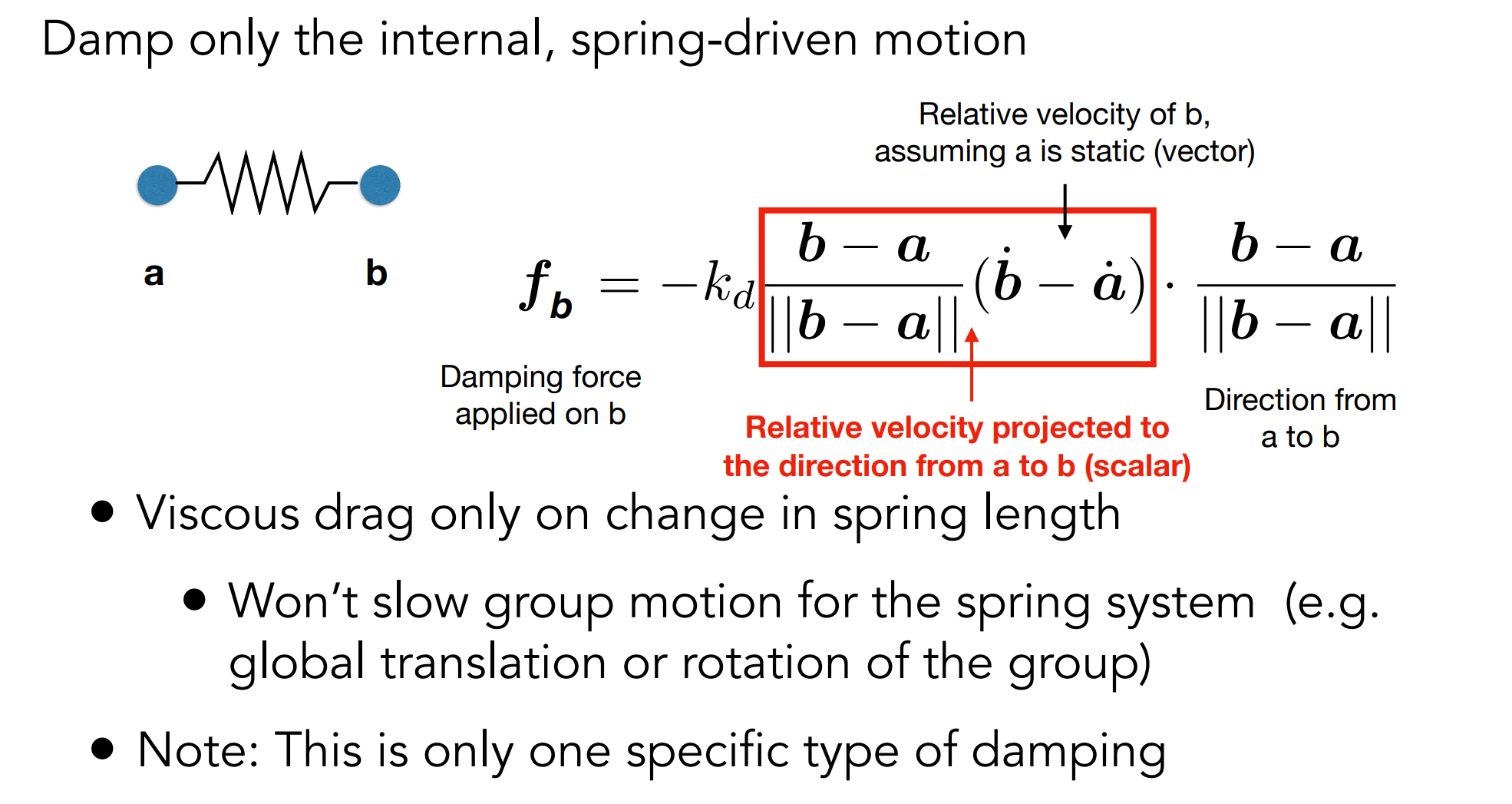
中间项为相对速度在向量$ab$方向的投影,因为(处于原长状态时)如果a点不动,b点绕a点做圆周运动,那$f_b=0$;
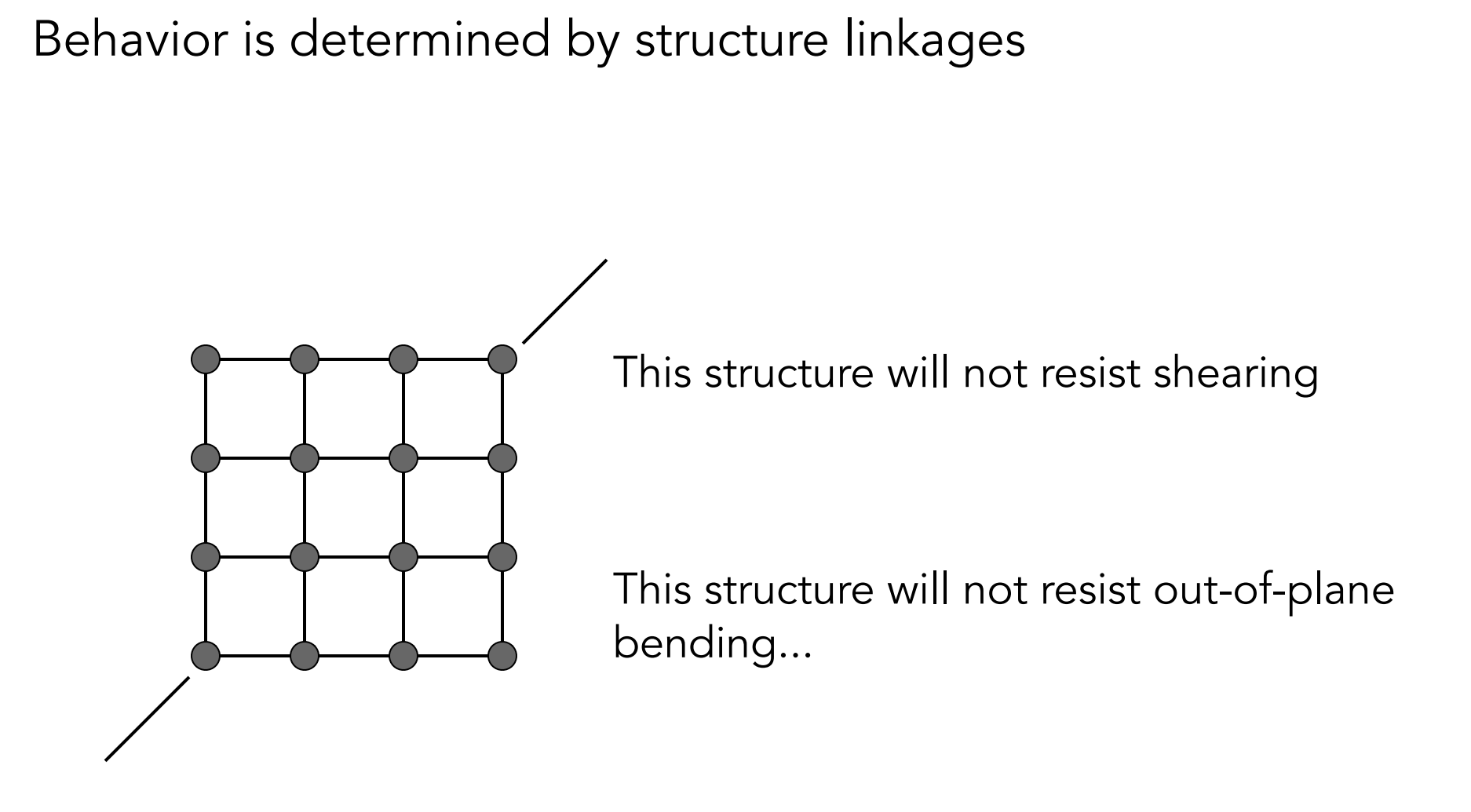
但是无法表现剪切力(如对角线拉布,布基本形状不变)、弯曲力(out-of-plane,抗拒被像纸一样完全折叠为两个三角形)等
加入两条对角线,以及skip connection
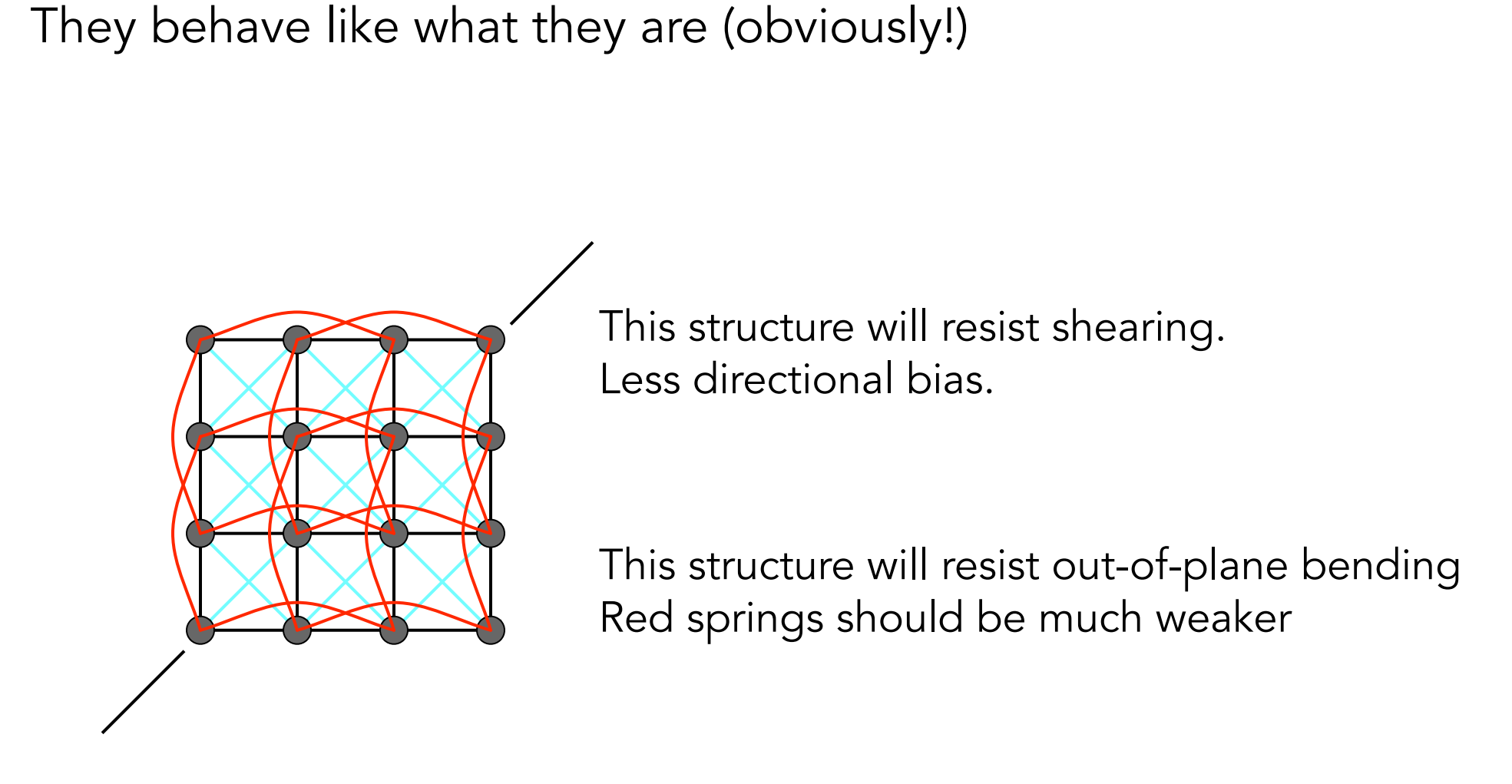
- 红色较弱,仅其辅助作用;蓝色较强,其主要作用;
其他方式:FEM (Finite Element Method, 有限元) Instead of Springs,考虑力传导
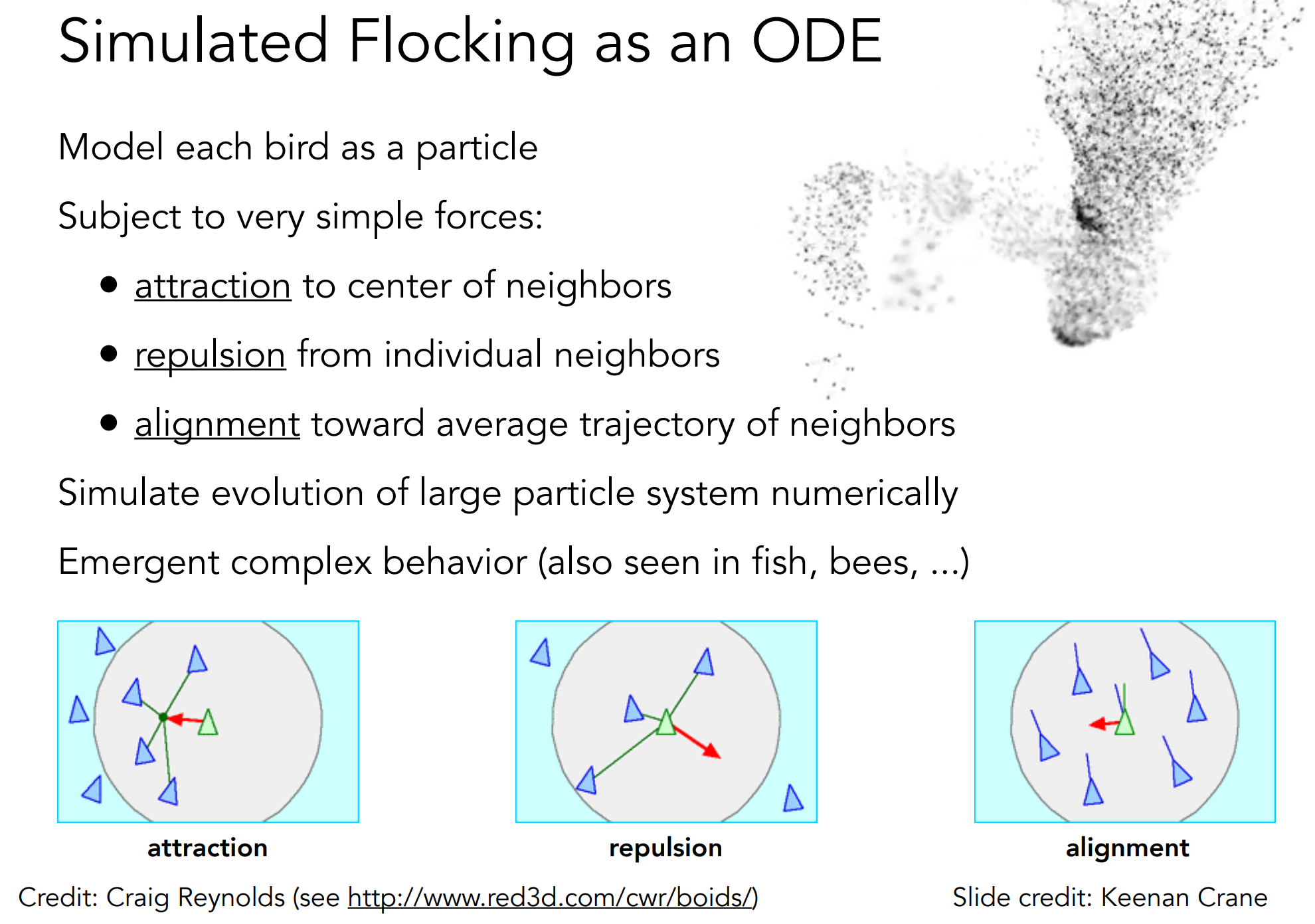
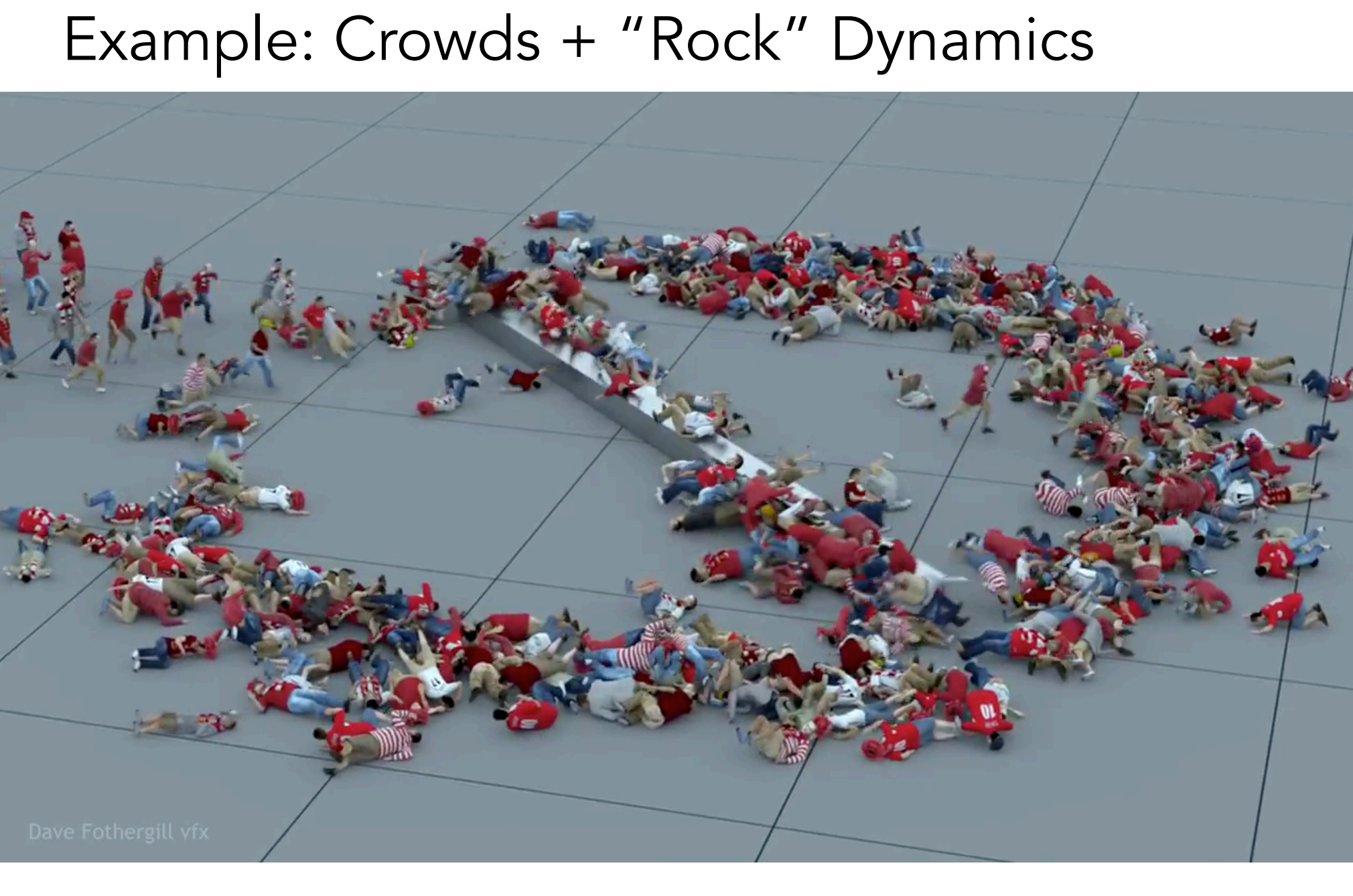
c.2). Particle System
- 粒子系统不仅可描述微小粒子,还可以描述一些群落;
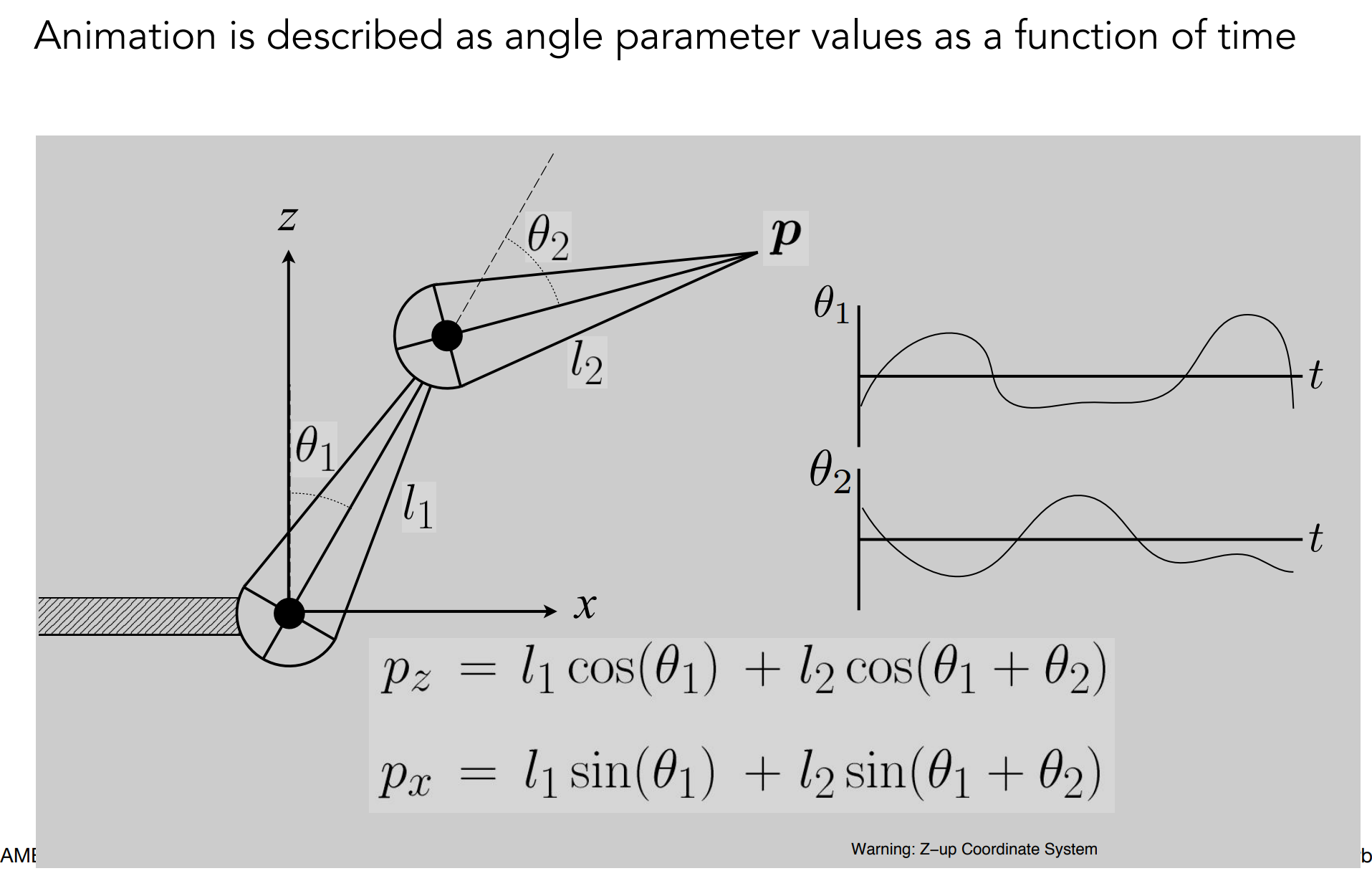
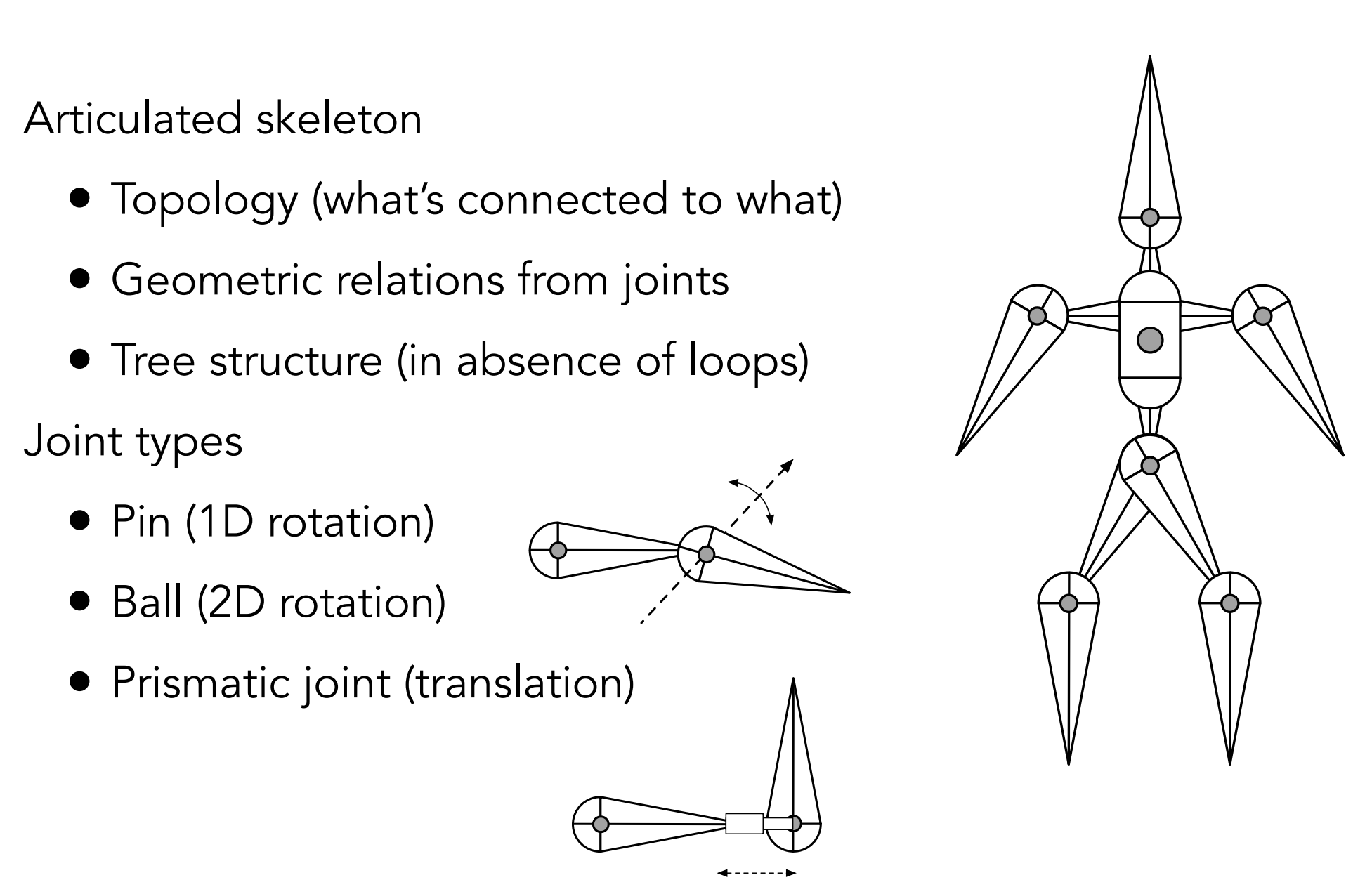
d). Forward Kinematics(FK)
关节(Joint)分类:
e). Inverse Kinematics(IK)
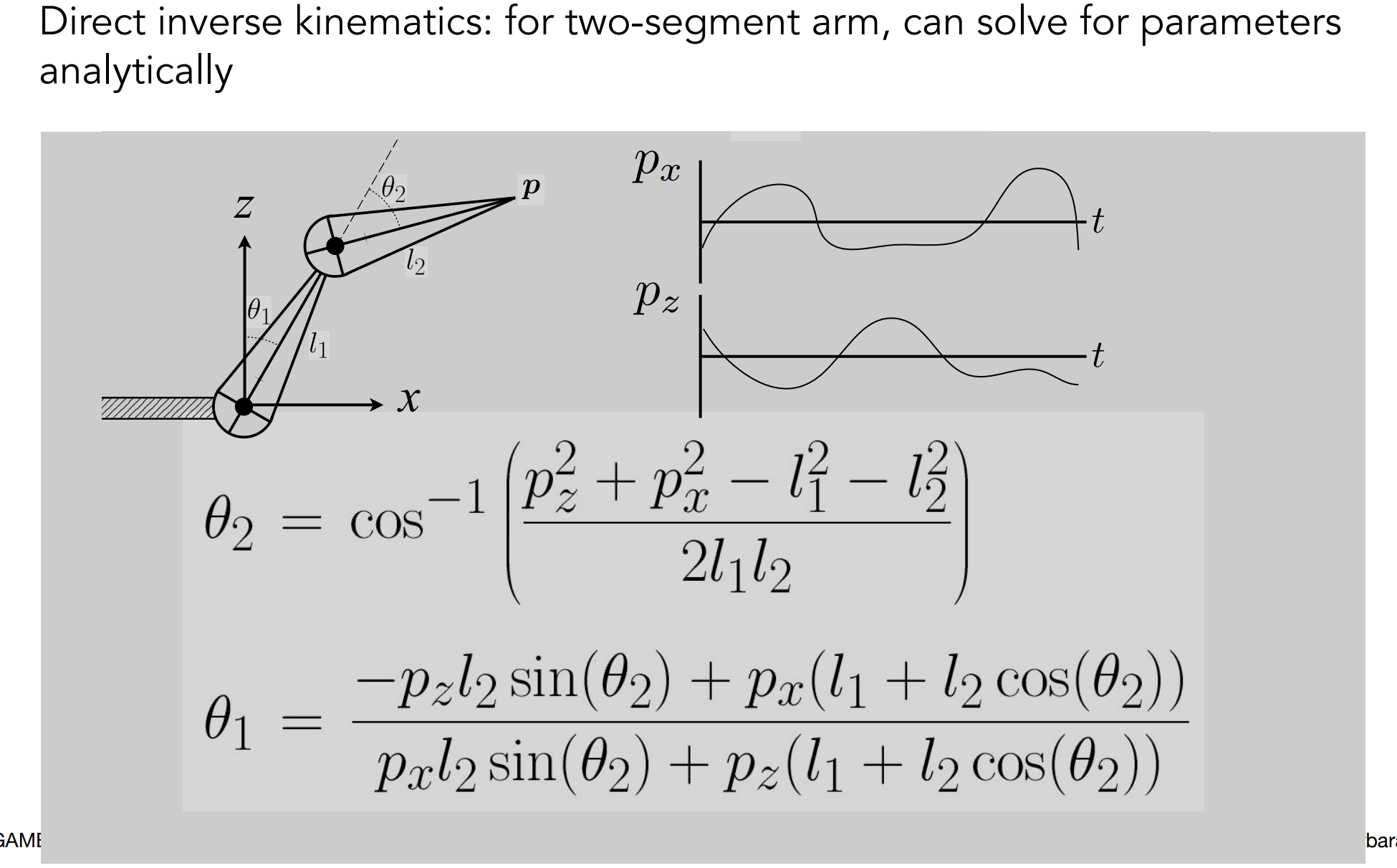
- 解决多个解的方法:梯度下降
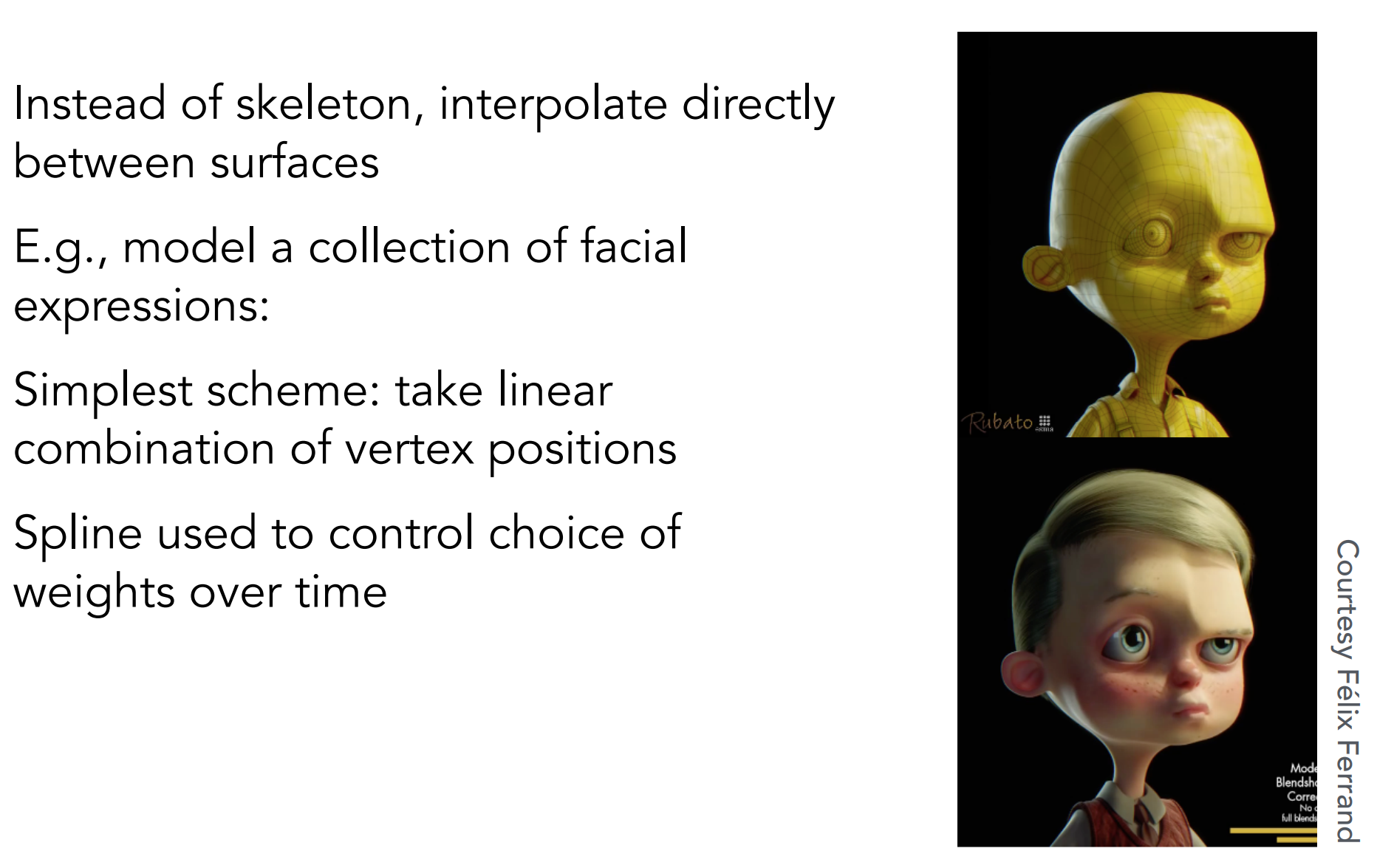
f). Rigging

Blend shapes: 混合控制点或骨骼位置
g). Motion Capture / Facial Motion Capture
Lecture 22
a). Single Particle Simulation
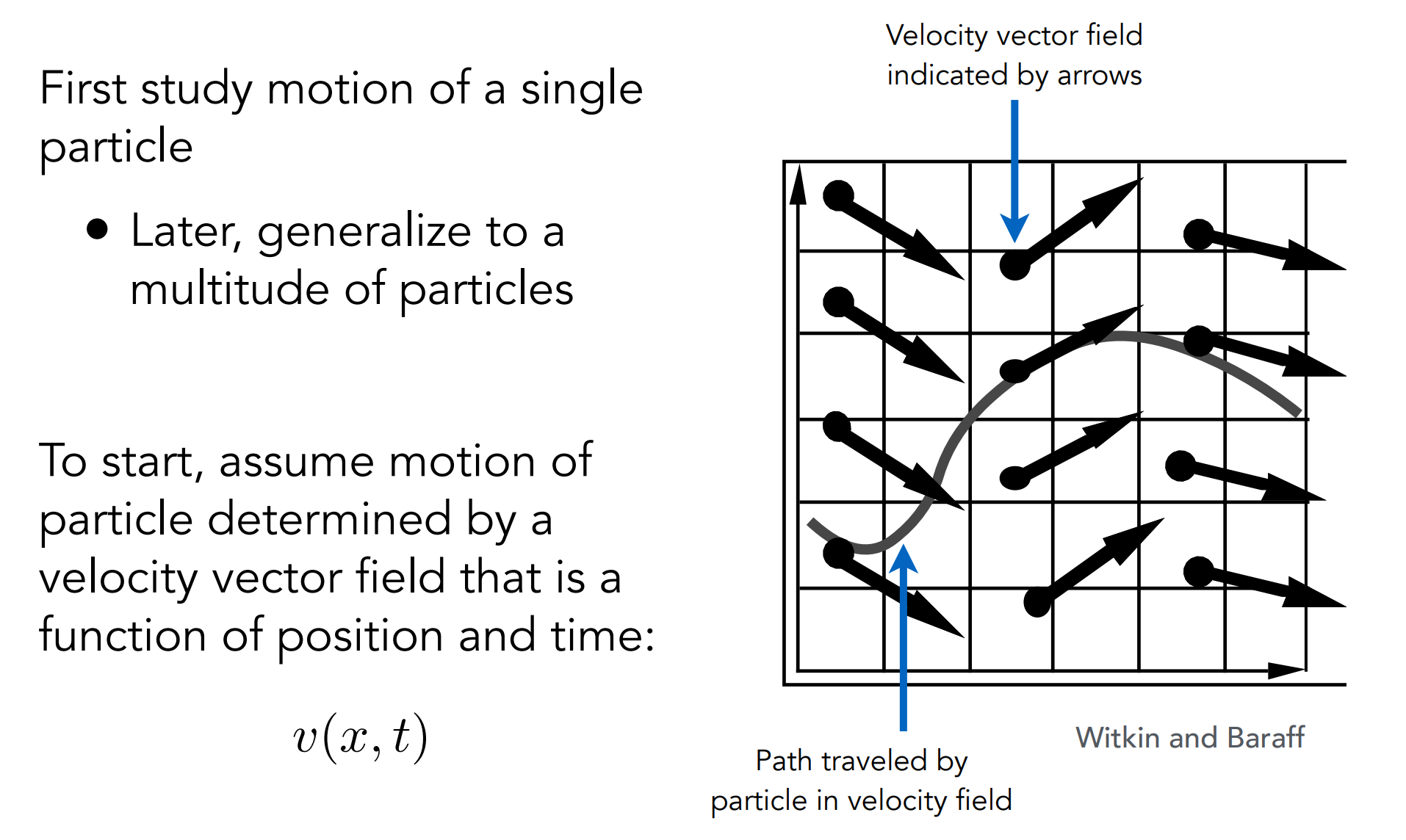
Velocity vector field: 给定位置,可以得出改点速度。和磁场、电场类似;
Oridinary Differential Equation(ODE, 常微分方程)
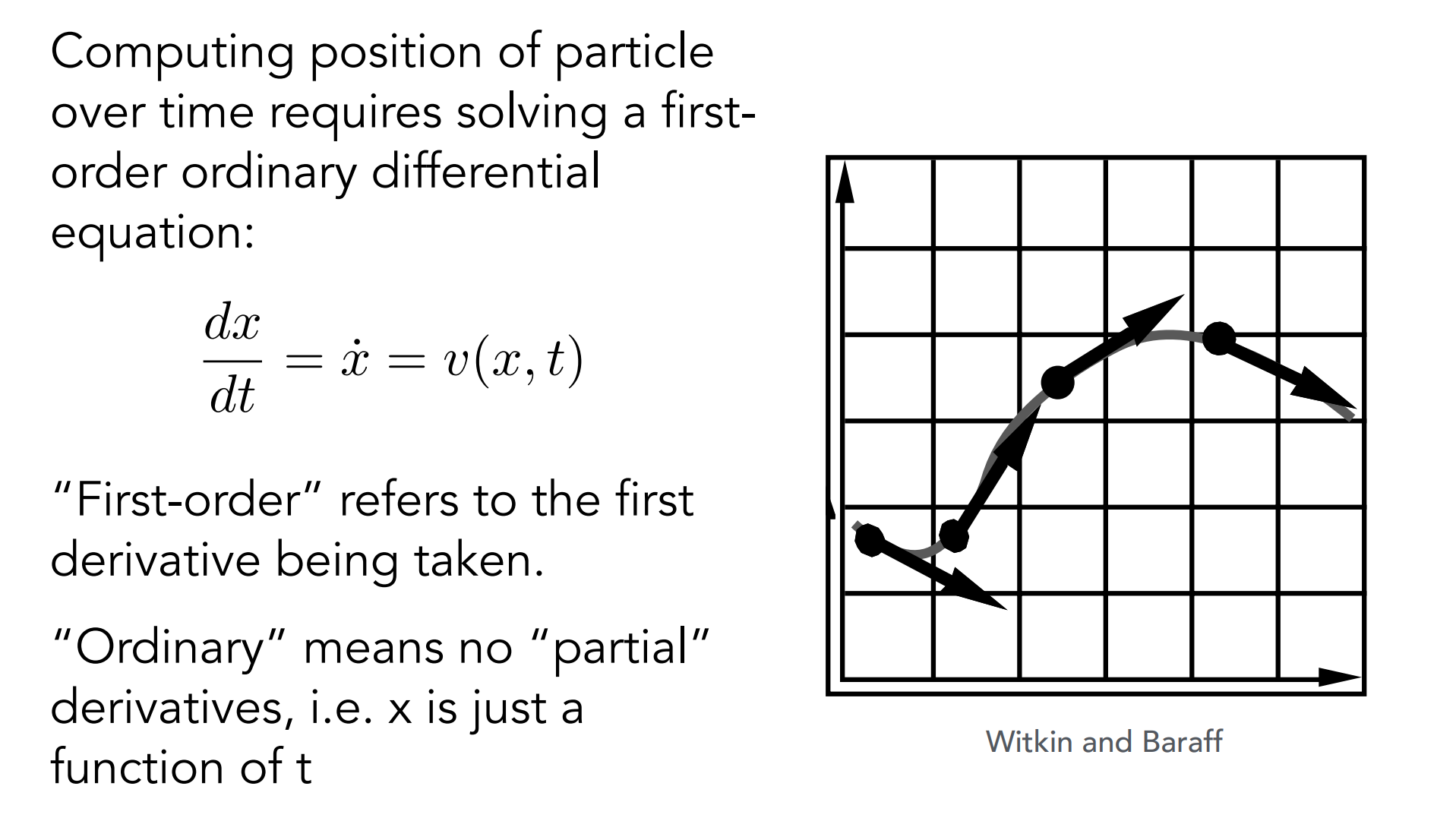
- 已知解得 t 时刻,粒子的位置和速度,需求得下一时刻的粒子位置;
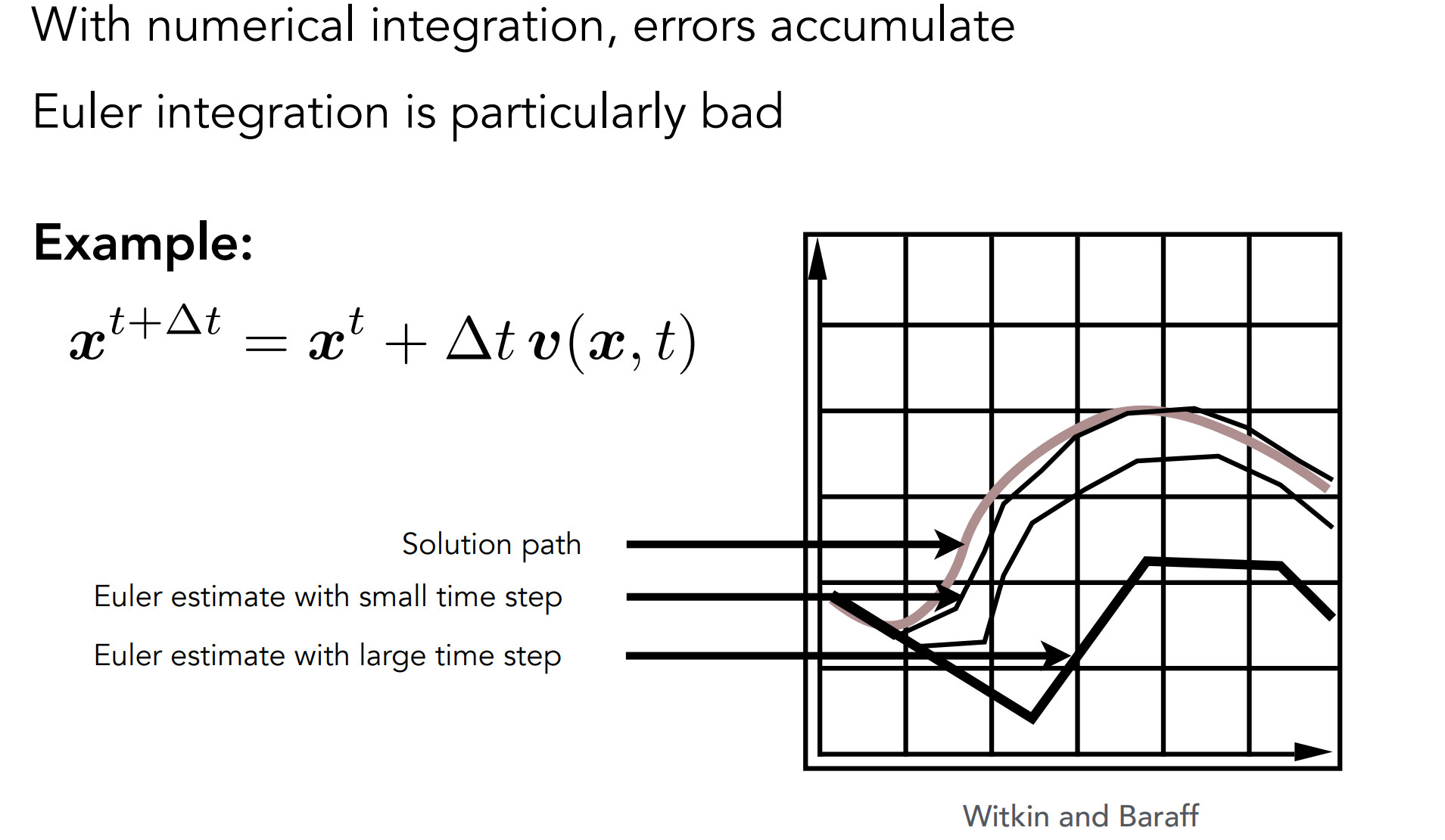
- 方法1:显式欧拉法(Explicit Euler method),用差分代替微分,但会引起误差,且稳定性差;
- 已知解得 t 时刻,粒子的位置和速度,需求得下一时刻的粒子位置;
a.1). Euler’s Method
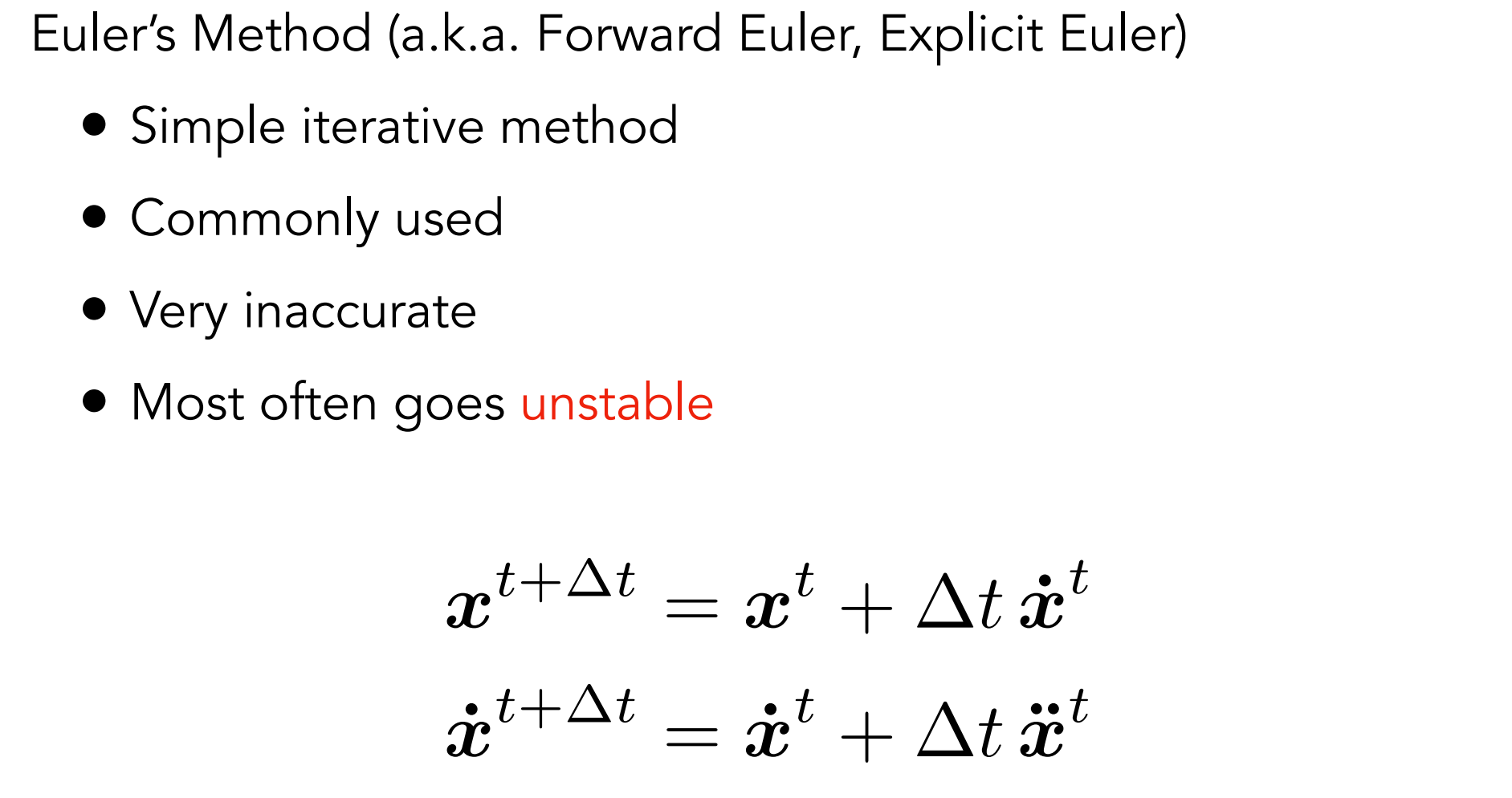
缺点:
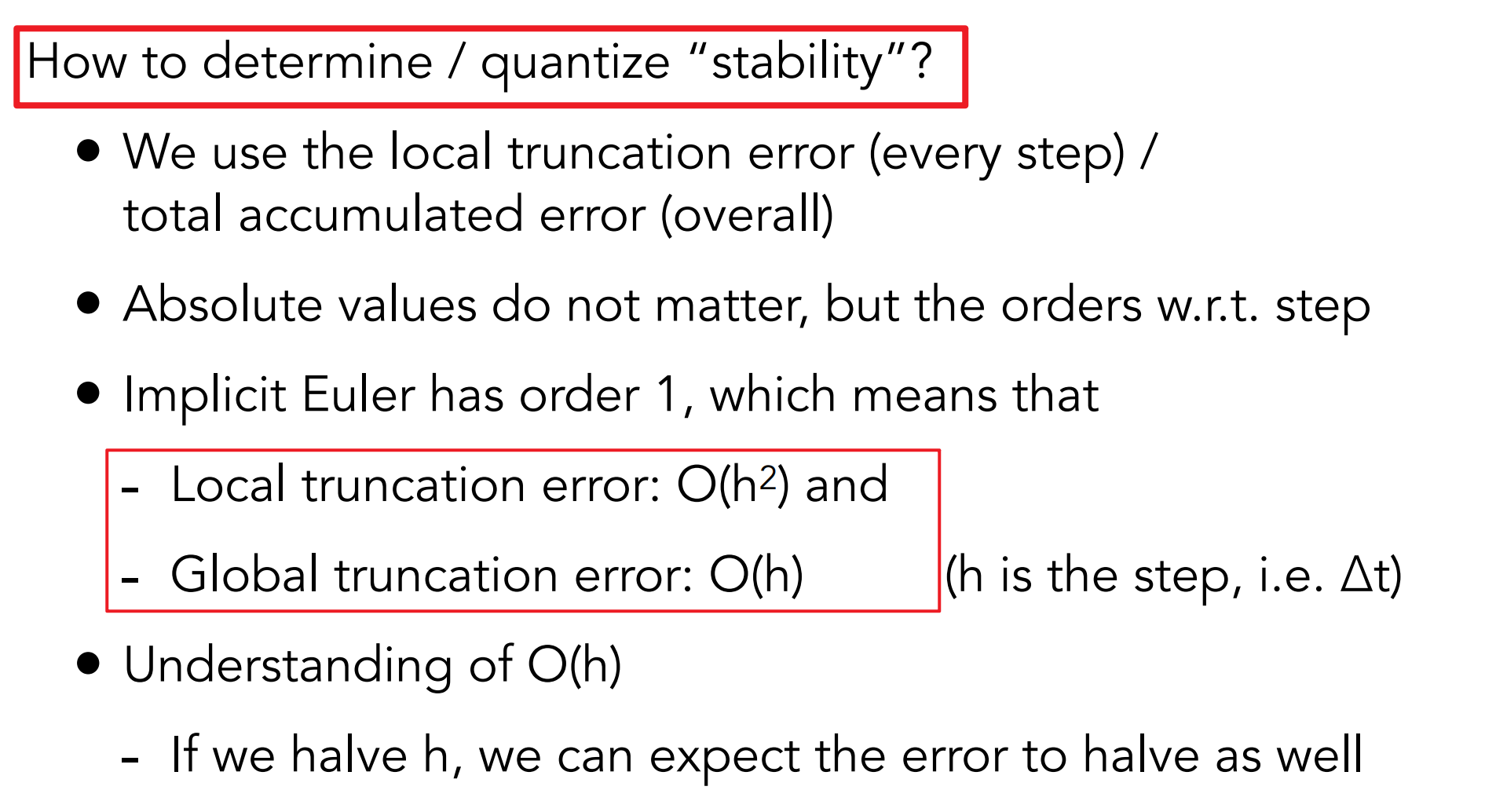
存在误差,可通过减小步长($\Delta t$)来减少误差;
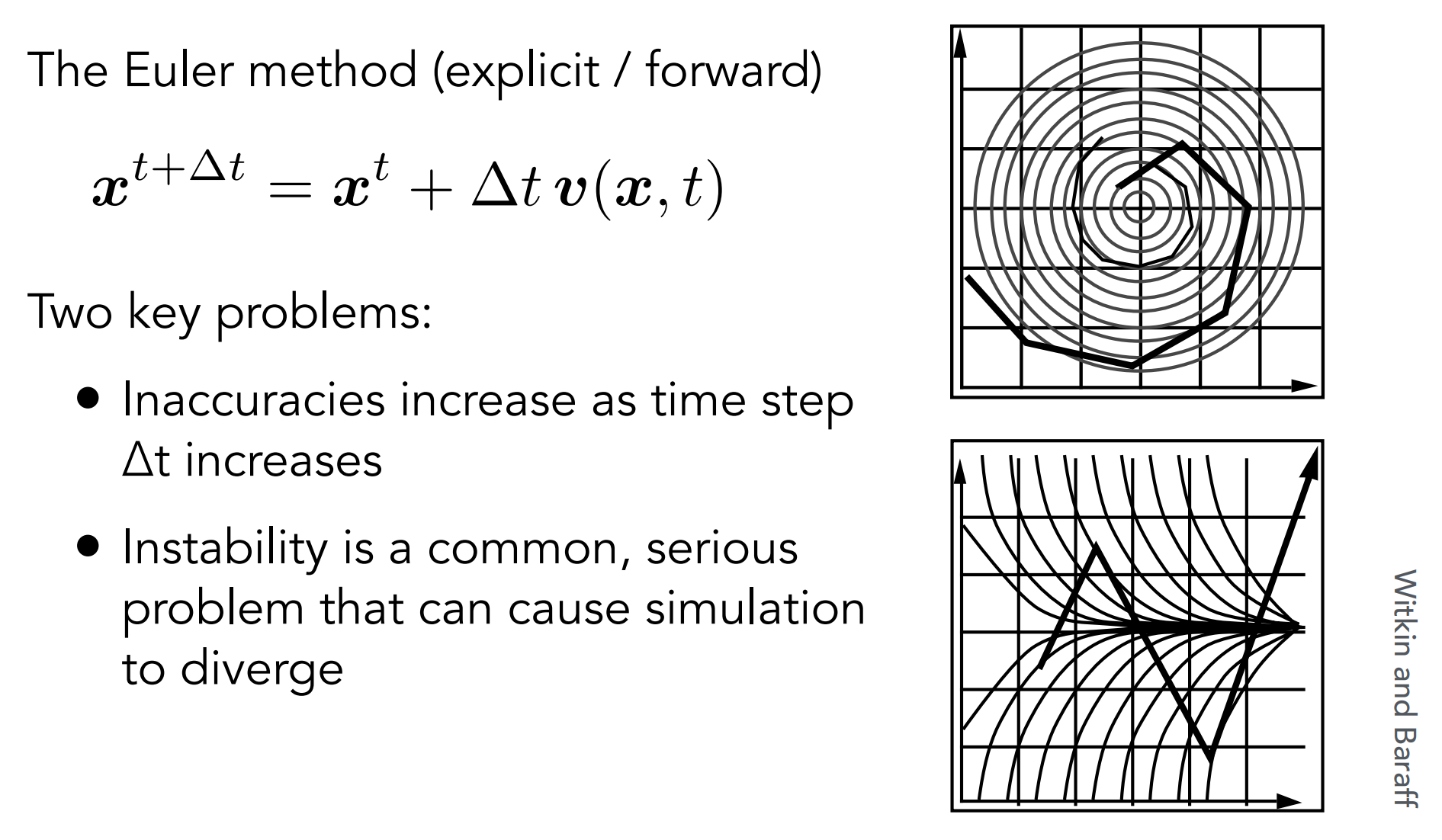
稳定性差,如速度场为同心圆时,不管步长多小都会逐渐偏移(diverge)
a.2). Combating Instability
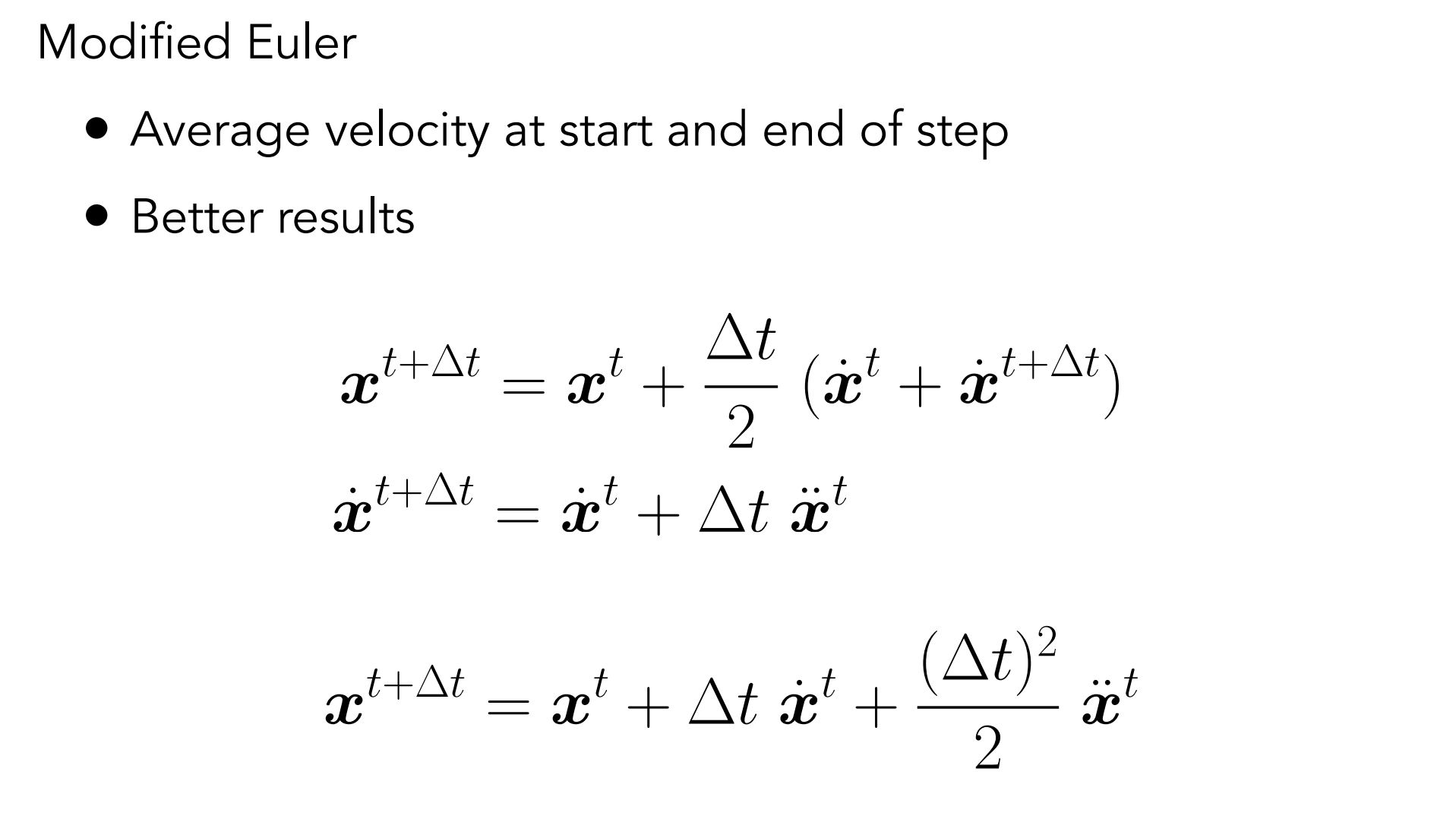
a.2.1). Midpoint Method
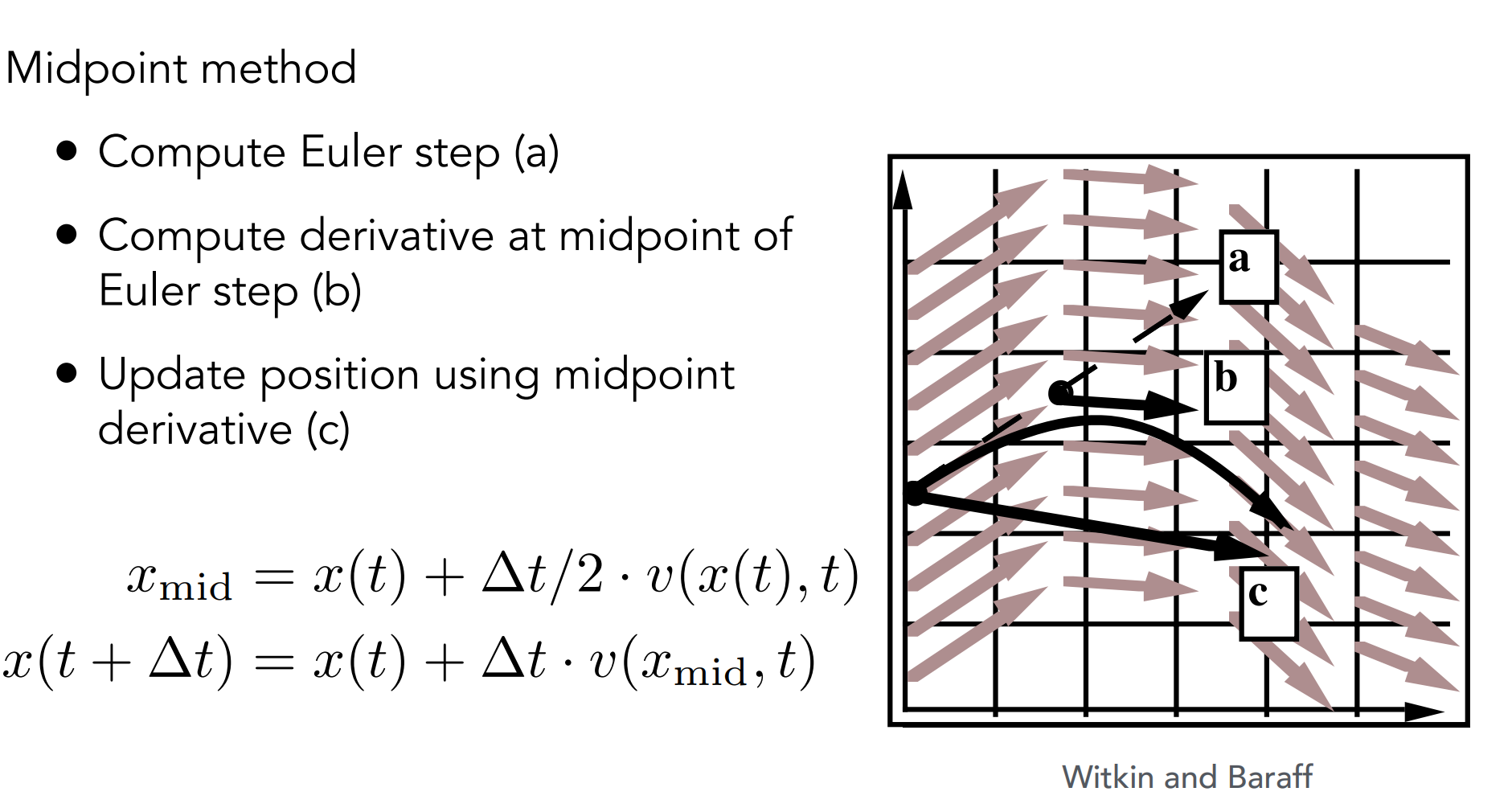
- 计算下一时刻位置后取中点,得到中点速度,在计算下一时刻位置时,使用中点速度
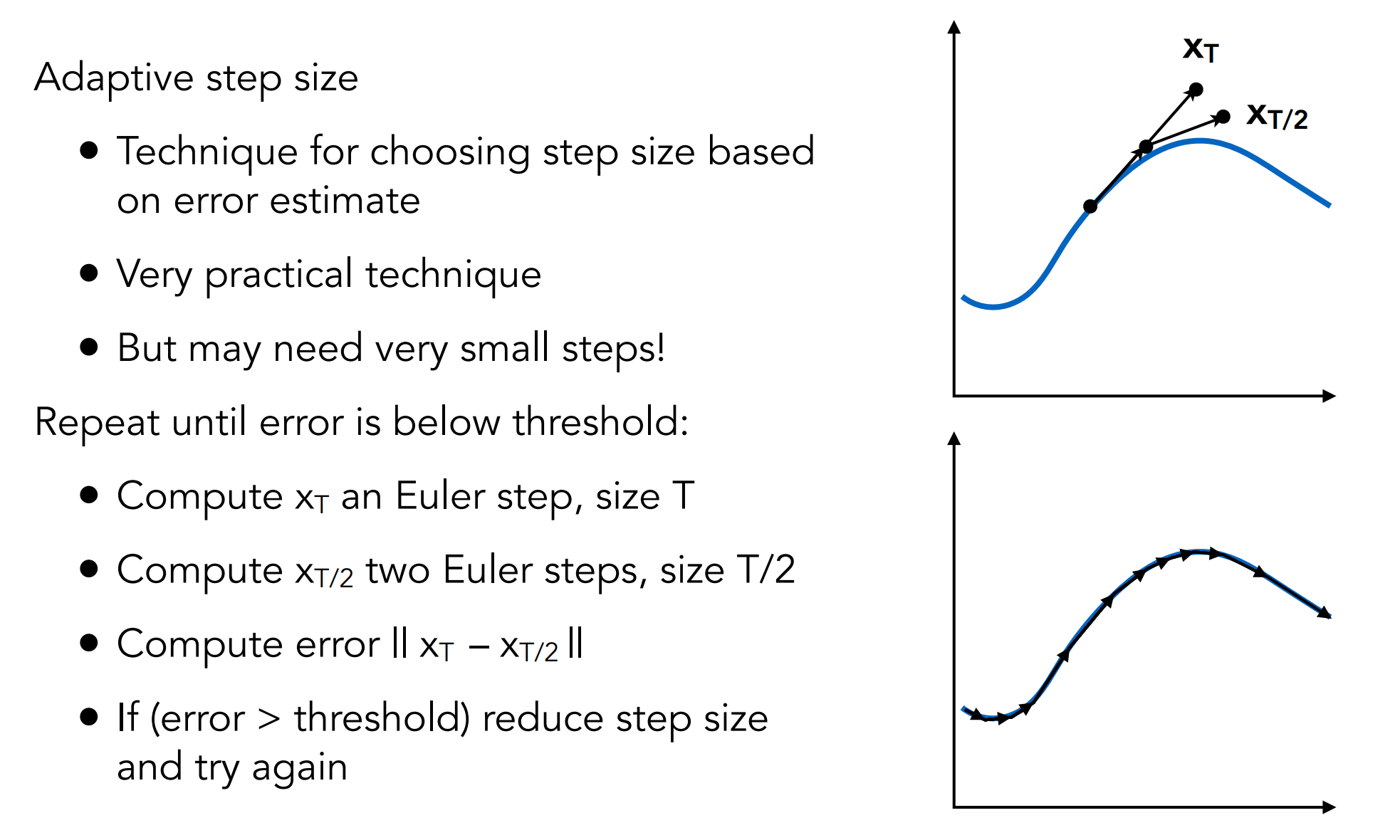
a.2.2). Adaptive Step Size
a.2.3). Implicit Euler Method
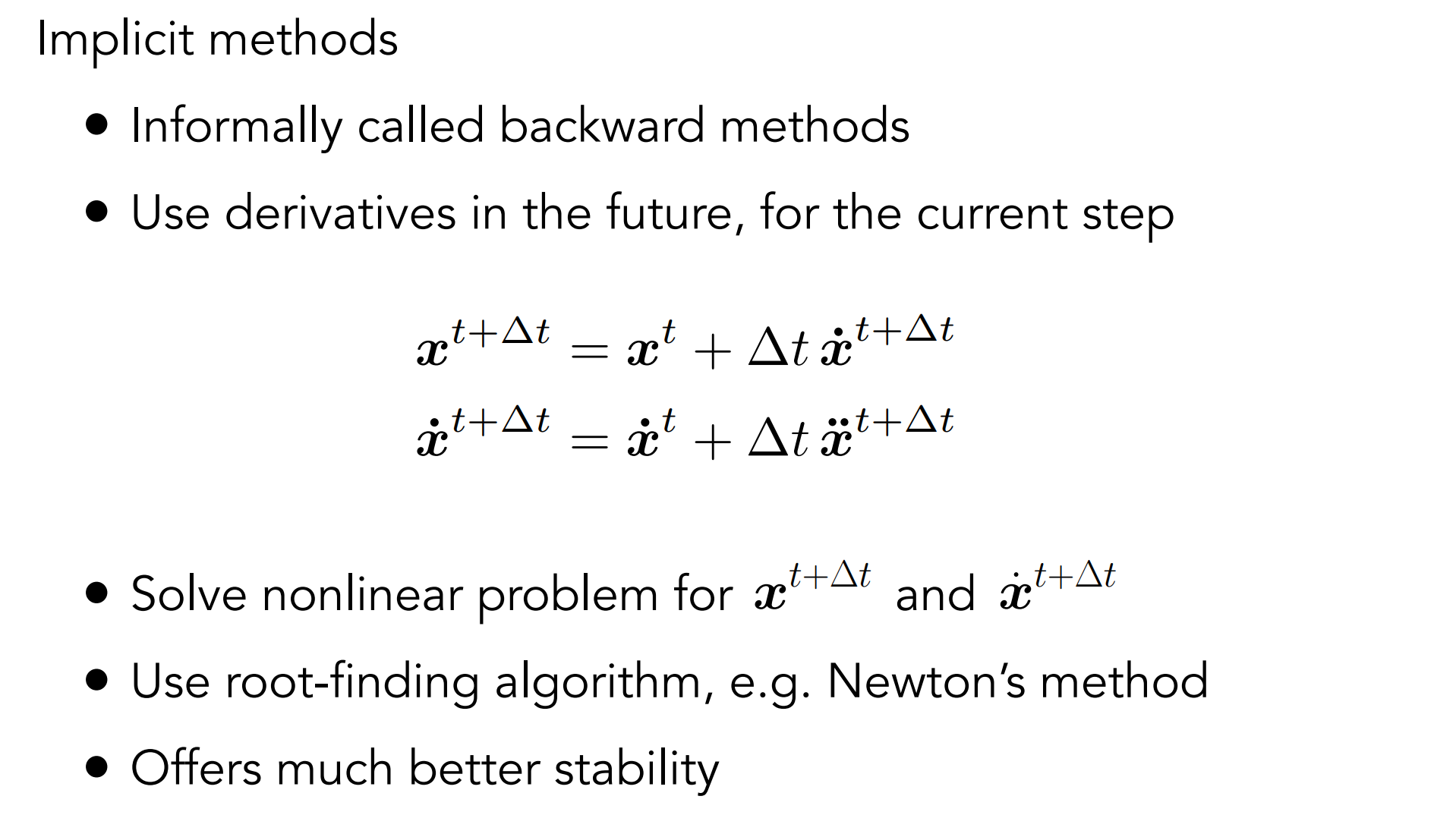
- 使用下一时刻的速度和加速度,并求解
 、
、
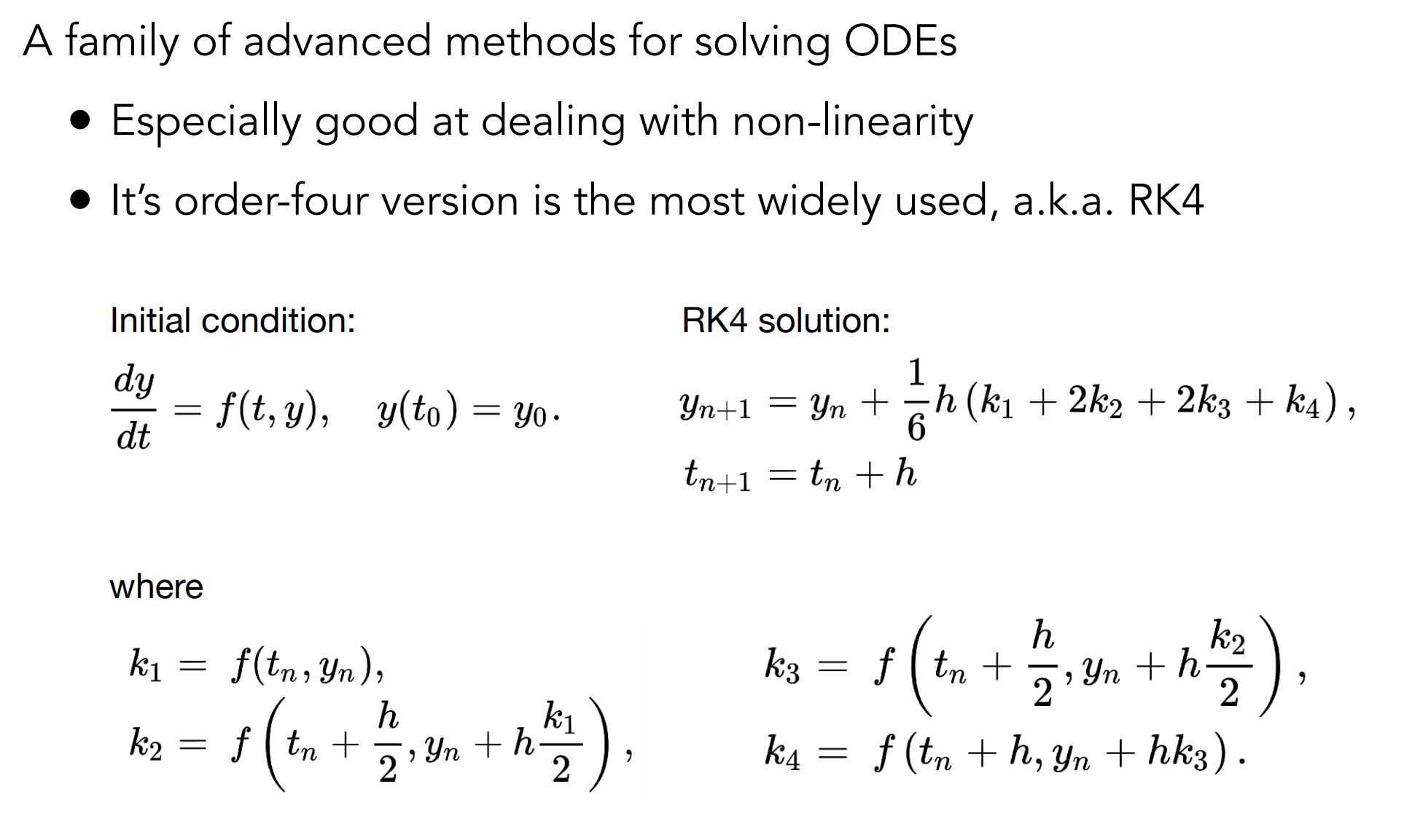
龙格库塔
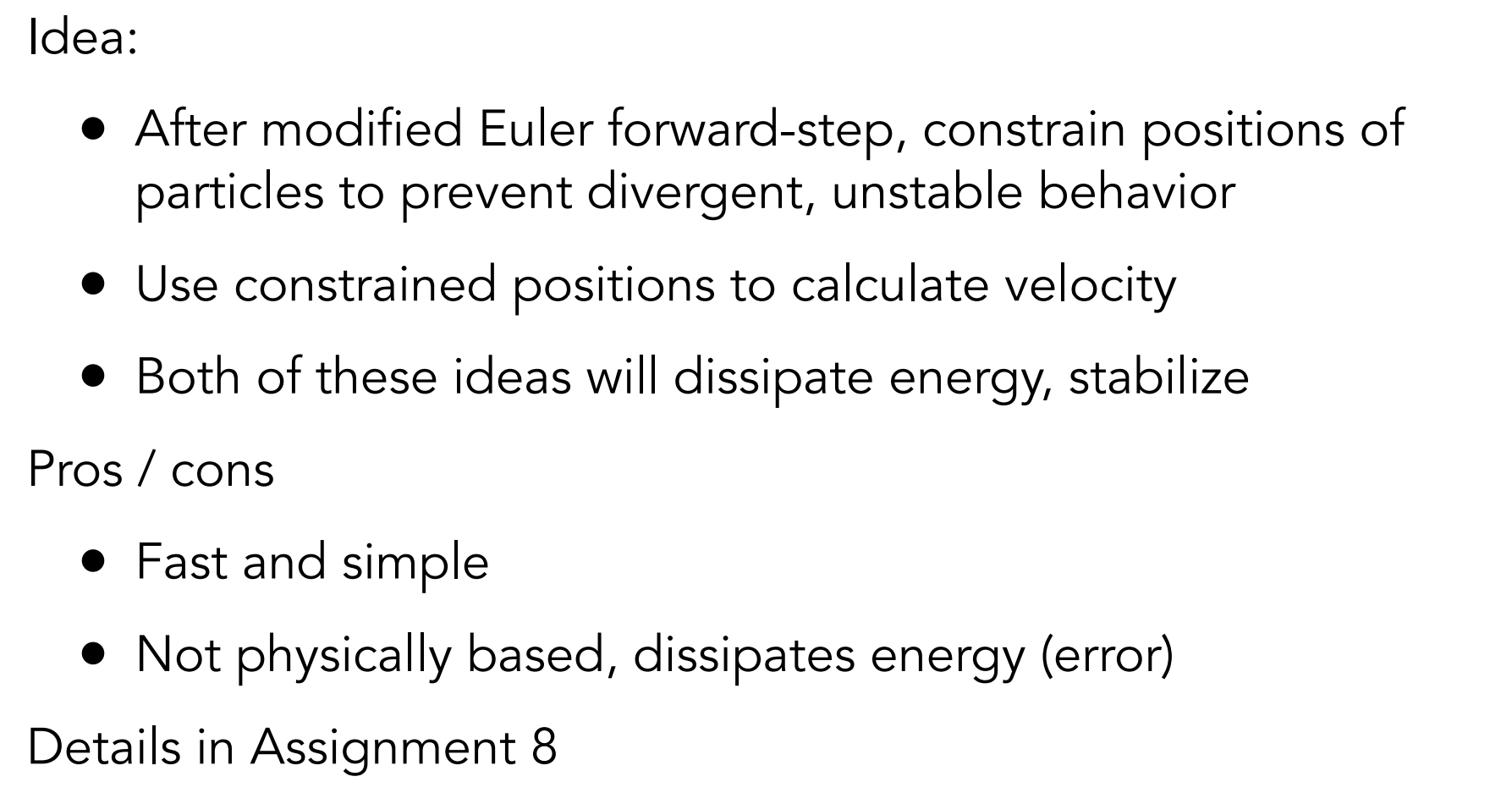
a.2.4). Position-Based / Verlet Integration
- 非基于物理
- 时间快
b). Rigid Body Simulation
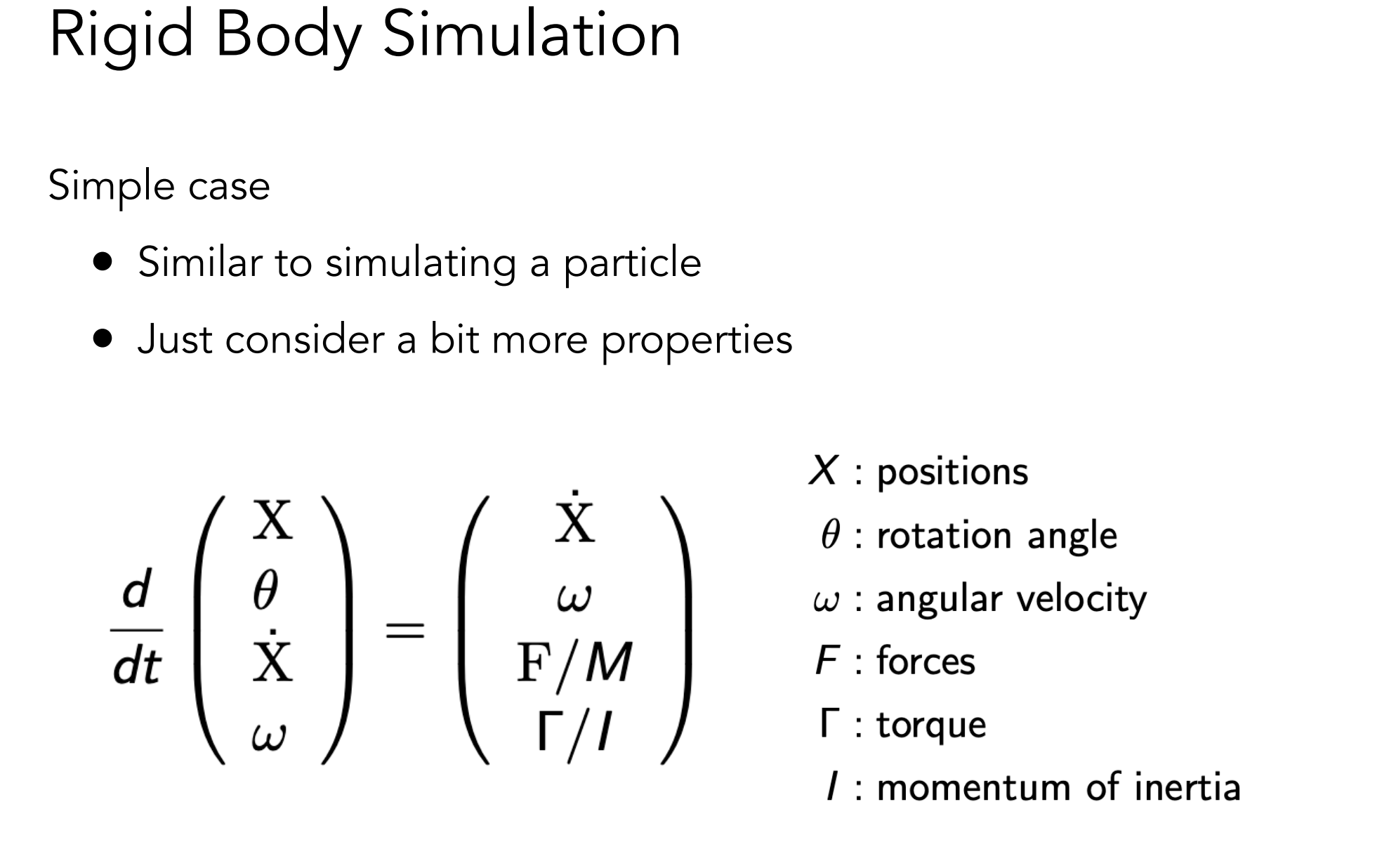
- 与单粒子类似
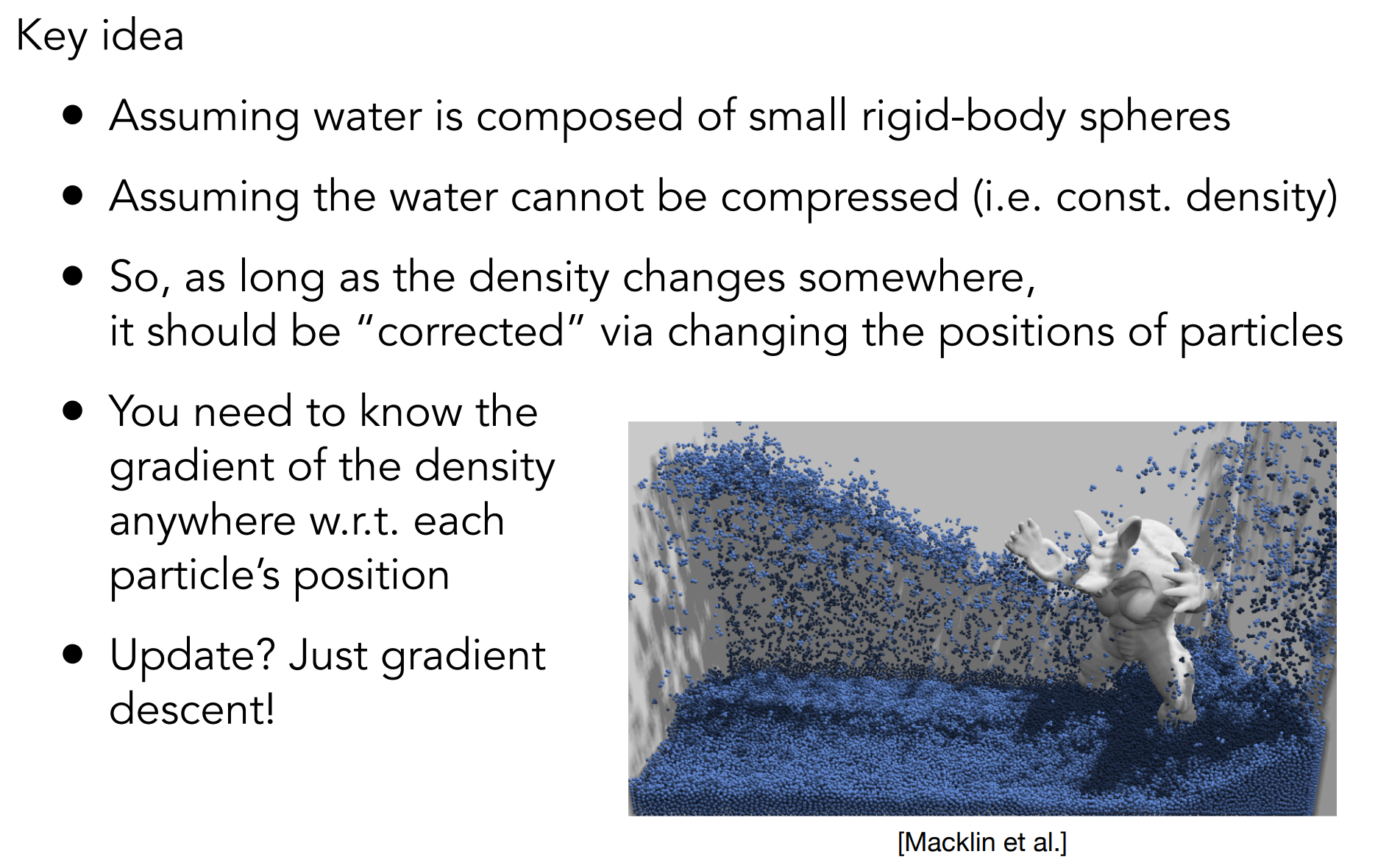
c). Fluid Simulation
c.1). A Simple Position-Based Method
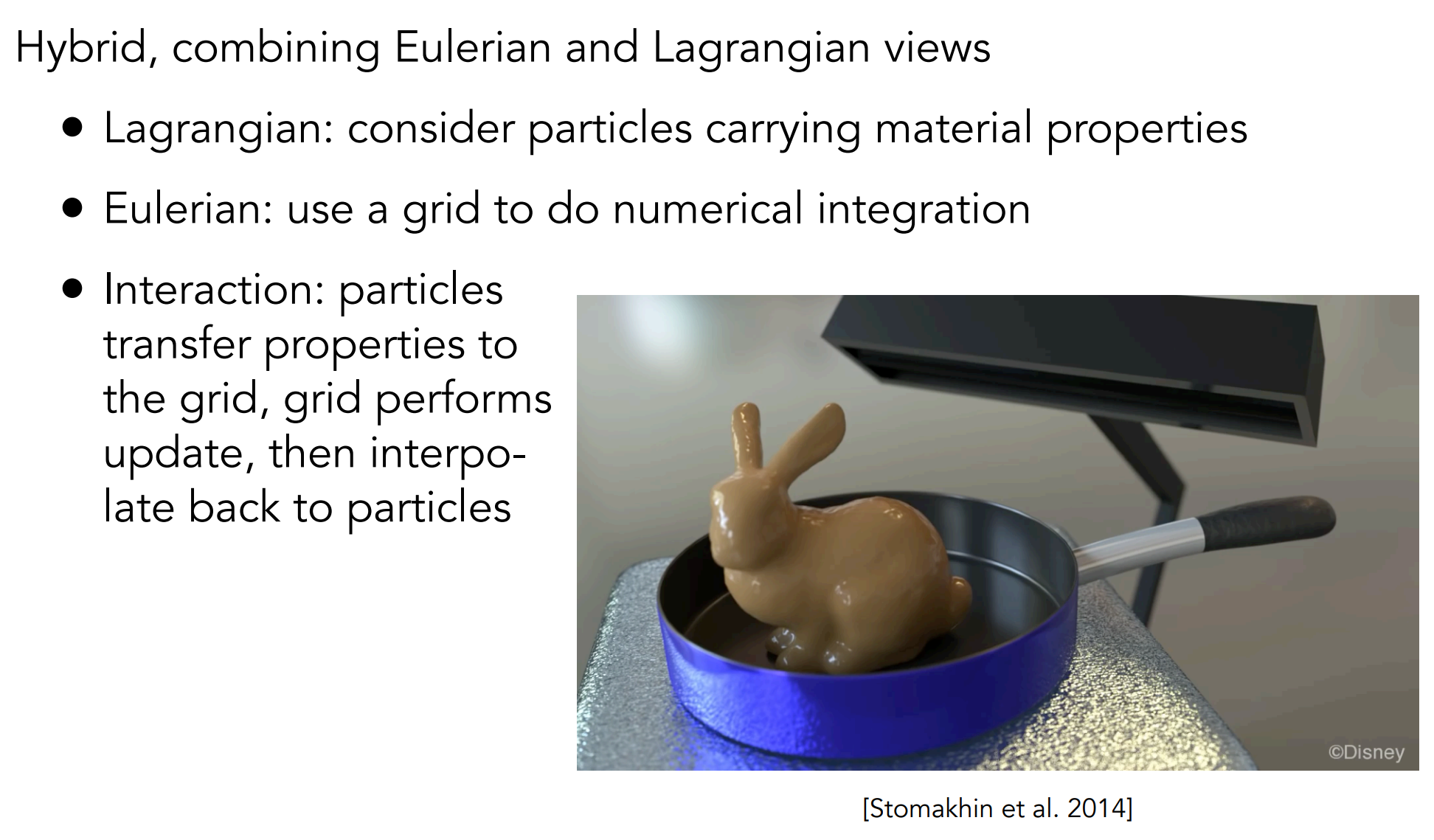
c.2). Eulerian vs. Lagrangian
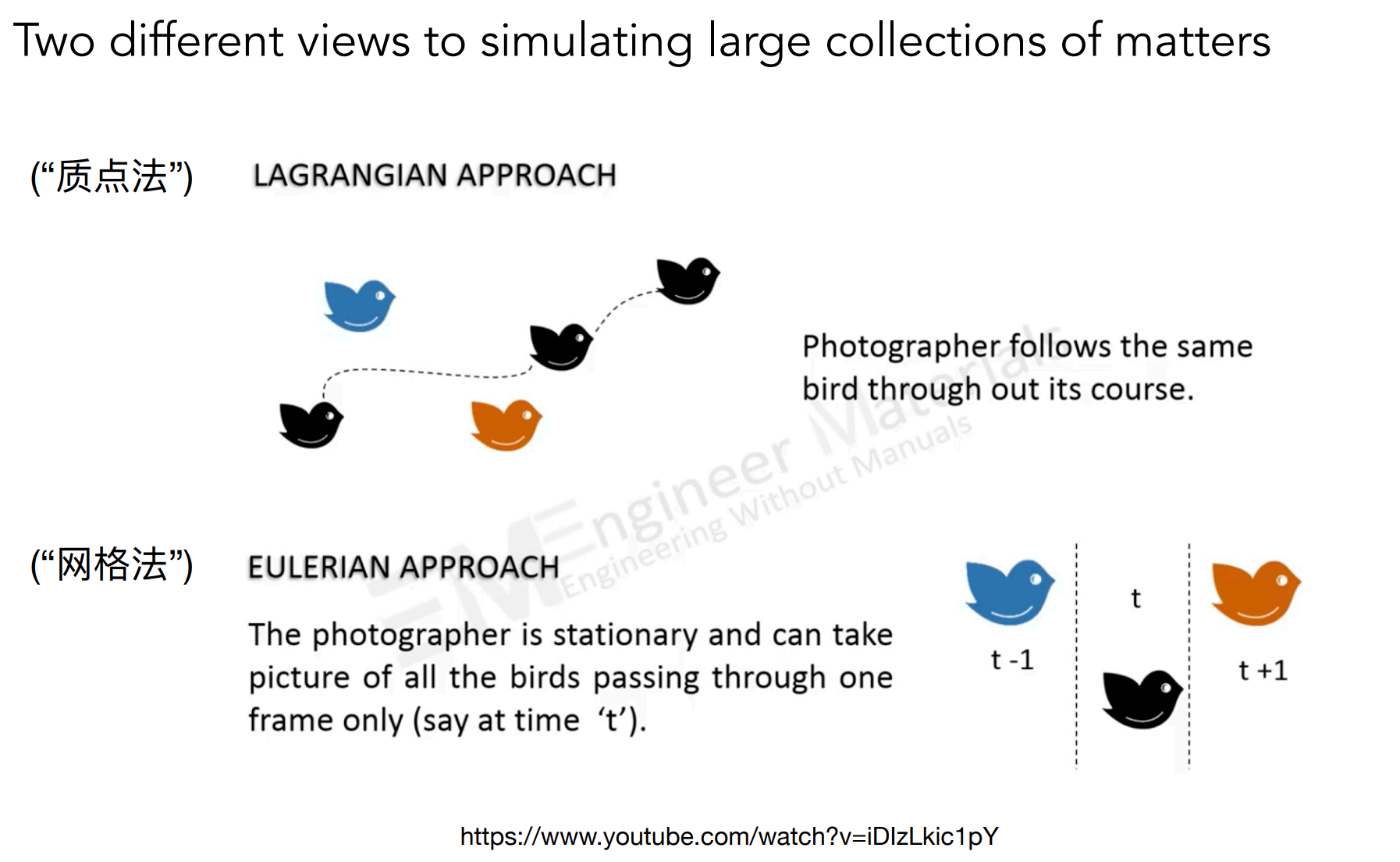
拉格朗日(质点法):考虑单个粒子的运动
欧拉(网格法):考虑不同位置的网格
Material Point Method (MPM ,混合上两种方法)